ششمین همایش سالانه رباتیک پوشیدنی WearRAcon 2021 در روز ۲۷ آوریل سال ۲۰۲۱ برگزار شد. در این همایش، که به علت همهگیری کرونا به صورت مجازی برگزار میشد، نوآوران صنعت اسکلت بیرونی از سراسر جهان حضور داشتند. برنامه همایش مشابه سالهای گذشته بود. سخنرانی اصلی، نمایش خلاصه نمونههای برتر، ارائهها کوتاه، سوال و جواب و یک ساعت خوش مجازی. به طور قطع نمیتوان شخصی را یافت که با قصد یادگیری در مورد اسکلتهای بیرونی وارد این همایش شده باشد و در انتهای آن خرسند نباشد. در ادامه به خلاصهای از وقایع روز دوم همایش میپردازیم. با مجله فناوریهای توان افزا و پوشیدنی همراه باشید.

دومین روز WearRAcon 21 در مورد حسگرهای پوشیدنی، اسکلتهای بیرونی پزشکی و صنعتی، واقعیت مجازی و سامانههای هدایت کننده پوشیدنیهای رباتیک بود. مدیرعامل Joe Hitt دومین روز کنفرانس مجازی را با یک خبر آغاز کرد: Wearable Robotics Trade Association یا WearRA در حال تبدیل شدن به یک نهاد غیر تجاری است.
در حالیکه شرکتکنندگان با نرمافزار کنفرانسهای مجازی موسوم به Brella بیشتر آشنا میشدند، کنفرانس به نخستین ارائه خود توسط BeBop Sensors رسید. در این سخنرانی به ضرورت استفاده از پوشیدنیها برای نامرئی شدن اشاره شد. BeBop Sensors با استفاده از پارچههای هوشمند (پارچههای تنیده شده با حسگرها) به این هدف نزدیکتر شده است. امروزه بشر به صورت دائم با منسوجات در تماس است. چه در لباس و چه در اساسیه پیرامونش. پس چرا این منسوجات ابزاری نباشد تا که پوشیدنیهای هوشمند واسکلتهای بیرونی به واسطه آن ارتقا یابد؟
Holotron
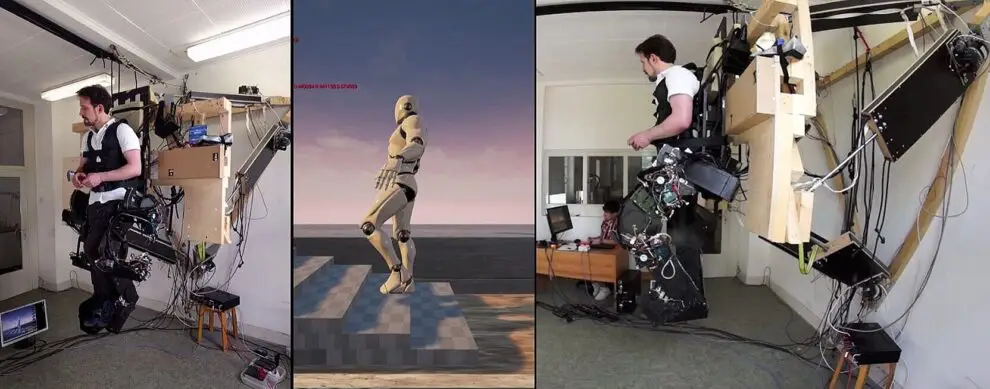
دکتر Marcel Reese نظرات خود را در مورد اسکلتهای بیرونی فعال برای شبیهسازی محیطهای مجازی بیان کرد. چیزی شبیه Holodeck که یک محیط کنترل شده برای برهمکنش با دنیای مجازی در فیلم پیشتازان فضا بود. ماشینهای فعلی تنها با اتکا به بخش کوچکی از بدن انسان به عنوان بسترکار یا interface کار میکنند. یک نمونه آزمایشی از یک پوشیدنی با ورودی حرکتی و توانایی بازخورد نیرو باید بتواند حس بدن را هنگام بالا رفتن از پله، تغییر جاذبه و یا هدایت یک تخته شنای مجازی شبیه سازی کند. نسخه کنونی گروه وی نخستین گونه از این نوع است. البته این نسخه بسیار حجیم است و ظاهر خوبی ندارد. اما اینک مراحل نخست کار سپری میشود. در نسخههای بعد اسکلت بیرونی بازوها را نیز پوشش خواهد داد. اندازه و وزن آن نیز کاهش مییابد.
سامانه های هدایت اسکلت بیرونی
دکتر Daniel Ferris فارف التحصیل دکتری از Pathways to Advancing Robotic Exoskeletons and Bionic Prosthesis سخنران بعدی بود. وی در مورد وضعیت کنونی هدایت اسکلتهای بیرونی و ارزیابی آنها صحبت کرد. به گفته وی مغز انسان در حرکت دادن بدن واقعا خوب عمل میکند. حداقل انرژی در این حرکتها صرف میشود. وزن تحمیلی یک اسکلت بیرونی به سادگی به معنای نیاز به انرژی بیشتر برای حرکت دادن اسکلت بیرونی است.
قدرت بیشتر رباتیک لزوما به معنای هزینه کمتر در سوخت و ساز نیست. اما افراد میتوانند بین حفظ تعادل و حرکتی که سوخت و ساز را بهینه میکند یکی را انتخاب کنند. انسانها در واقع در هر بار حرکت چیزی حدود ۴۰ قدم راه میروند. پس یک تردمیل که بیش از پنج دقیقه راه رفتن را به فرد تحمیل کند، یک حرکت واقعی نیست.
از این نقطه نظر نمیتوان فقط یک استاندارد برای بازده اسکلت بیرونی به کار گرفت. در عوض باید یک معیار جامعتر برای کل بدن به کار برد. در حالت ایدهآل کاربر باید وجود اسکلت بیرونی را فراموش کند. مغز انسان باید زمان کافی برای عادت کردن به وسیله داشته باشد(در حدود ۳۰ دقیقه). اسکلت بیرونی نیز باید رفتاری سازگار داشته باشد. هر چند میزان خطا یا اختلال هنوز یک بحث باز است. اسکلت بیرونی همچنین باید وظیفه خاص خود را به انجام رساند. این وظیفه ممکن است کاهش سوخت و ساز بدن باشد. و یا ممکن است چیز دیگری باشد.
ساز و کار هدایت مناسب مهمترین هدف در این حوزه است. دکتر Ferris در این مورد نتایج سونوگرافی، EMG، آلتراسونوگرافی، EEG، و ایمپلنتهای کورتکس مغز را نشان داد. نکته مهم در هر مورد کاهش زمان پاسخ است. ممکن است که مکانیزم هدایت روی تردمیل خیلی خوب کار کند. اما همین مکانیزم هدایت میتواند در دنیای واقعی عملکردی بسیار بد داشته باشد. هر چند همه هدایتکنندهها شبیه هم نیستند و نباید با هم ادغام شود.
چالش نوآوری WearRA
دومین روز WearRAcon21 دوازده سخنرانی و نمایش محصول داشت. به جز این موارد سخنرانیهایی در مورد طراحی و مدلسازی مجازی نیز بود. سخنرانی دکتر Ann M. Spungen در مورد تجربیات وی پس از ده سال کار با اسکلت بیرونی پزشکی، یک سخنرانی با سرعت زیاد بود.
چالش فناوری WearRA نیز در روز دوم کنفرانس برگزار شد. امسال کلیه فینالیستها یک ویدیو از کار خود ارسال کرده بودند. اطلاعات در مورد کار آنان در سایت اصلی WearRA موجود است(اینجا). برندگان این مسابقه در سومین و آخرین روز کنفرانس اعلام شده است.
بیشتر بخوانیم:
گزارش نخستین روز همایش WearRAcon 2021
آشنایی با اسکلت های بیرونی چالش نوآوری WearRAcon2019
WearRAcon19 : گزارش روز نخست همایش فناوریهای رباتیک پوشیدنی ۲۰۱۹
منبع: exoskeletonreport
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


