پژوهشگران سامانه رابط مغز و رایانهای توسعه دادند که به کمک آن میتوان بازوی رباتیک را برای در دست گرفتن و جابجایی اجسام کنترل کرد. این سامانه مبتنی بر ثبت غیر تهاجمی سیگنال مغز است، پس براحتی و بدون نیاز به هیچ عمل جراحی میتوان از آن استفاده کرد.
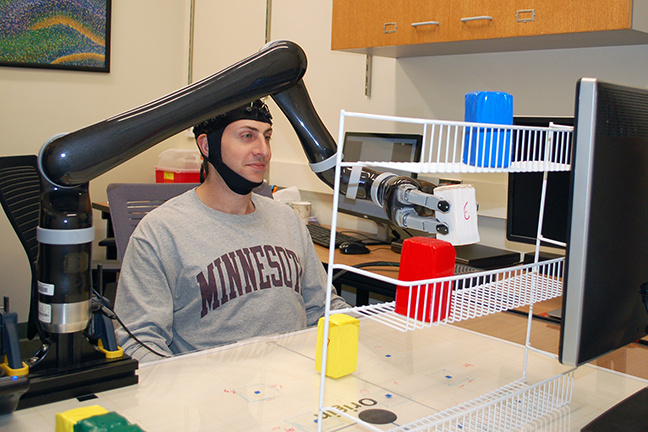
افراد شرکت کننده در پژوهش دانشگاه مینه سوتا به کلاه مغزی EEG غیرتهاجمی مجهز شدند و قادر بودند یک بازوی رباتیک را در سه بعد تنها با تصور حرکت دست خود، کنترل کنند (کالج علوم و مهندسی دانشگاه مینه سوتا)
پژوهشگران در دانشگاه مینه سوتا (Minnesota) به موفقیت بزرگی دست پیدا کردند که به افراد اجازه میدهد یک بازوی رباتیک را در سه بعد و تنها با استفاده از ذهن خود کنترل کنند. این پژوهش پتانسیل کمک به میلیونها انسان معلول و یا مبتلا به بیماریهای عصبی را دارد.
این مطالعه در مجله گزارشهای علمی منتشر شده و در دسترس قرار دارد.
Bin He، استاد زیست پزشکی در دانشگاه مینه سوتا و رهبر این پژوهش میگوید: «این نخستین بار در جهان است که افراد میتوانند یک بازوی رباتیک را برای رسیدن به اشیاء و در دست گرفتن آنها در یک محیط پیچیده سه بعدی تنها با استفاده از افکار خود و بدون ایمپلنت مغزی کنترل کنند. آنها تنها با تصور حرکت دستهای خود، قادرند بازوی رباتیک را حرکت دهند».
در این روش غیر تهاجمی، فعالیت الکتریکی ضعیف مغز با استفاده از کلاه EEG با فناوری بالا و مجهز به ۶۴ الکترود ثبت میشود. سپس یک رایانه به کمک پردازش پیشرفته سیگنال و یادگیری ماشین، افکار را به عمل تبدیل میکند.

یک نمونه از الکترودهای کاشته شده در بدن که به بیمار اجازه میدهد یک بازوی رباتیک را با افکار خود کنترل کند (UPMC)
این سامانه جدید مشکلات سامانههای پیشین BCI را حل کرده است. در تلاشهای پیشین از مجموعه الکترودهای تهاجمی که در قشر مغز قرار میگرفت برای کنترل بازوهای رباتیک یا بازوی خود بیمار به کمک تحریک الکتریکی عصبی عضلانی استفاده میشد. این سامانهها در ابتدا با خطر عوارض بعد از عمل و عفونت مواجه هستند و در طول زمان کار کردن با آنها دشوار میشود. همچنین آنها به صورت محدود مورد استفاده قرار میگیرند.

یک دستگاه مبتنی بر EEG که اجازه می دهد تا فرد قطع عضو با استفاده از یک دست مصنوعی و تنها با افکار خود شیء را در دست بگیرد (دانشگاه هوستون)
اخیراً از EEG غیر تهاجمی استفاده شده است. ثبت امواج مغزی به این شکل خطرناک نیست، به عمل جراحی گران قیمت نیاز ندارد و به آسانی و خیلی سریع میتوان الکترودها را به پوست سر متصل کرد. برای نمونه در سال ۲۰۱۵ پژوهشگران دانشگاه هوستون یک سامانه مبتنی بر EEG توسعه دادند که به کاربران اجازه میدهد با موفقیت اشیایی از جمله یک بطری آب و یک کارت اعتباری را در دست بگیرند. ۸۰ درصد از مواقع، موضوع در دست گرفتن اشیاء انتخاب شده با استفاده از یک دست مصنوعی با فناوری بالا که جای اندام قطع شده نصب شده، انجام گرفته است.
دیگر سامانههای مبتنی بر EEG برای بیماران شامل یک اسکلت بیرونی پایین تنه و یک اسکلت بیرونی رباتیک دست کنترل شونده با ذهن بوده است. با این حال، این سامانهها برای کنترل چند بعدی بازوی رباتیک مناسب نیستند و به بیماران اجازه حرکت، رسیدن به شیء و در دست گرفتن آن در فضای سه بعدی را نمیدهد.
کنترل کامل سه بعدی یک بازوی رباتیک تنها با فکر و بدون ایمپلنت
سامانه جدید BCI مبتنی بر EEG که در دانشگاه مینه سوتا توسعه یافته قادر است یک بازوی رباتیک را در فضای سه بعدی آزادانه و به صورت طبیعی حرکت دهد و فعالیتهایی همچون برداشتن فنجان، حرکت آن روی میز و کمک به نوشیدن از آن را انجام دهد.
این فناوری جدید اساساً به همان روش سامانه رباتیک مبتنی بر الکترودهای کاشته شده و فعالیت قشر حرکتی (منطقهای از مغز که کنترل حرکات را برعهده دارد) کار میکند. هنگامی که انسان حرکت میکند و یا در مورد انجام یک حرکت فکر میکند سلولهای عصبی در قشر حرکتی، جریان الکتریکی کوچکی تولید میکنند. یک پدیده تأیید شده با استفاده از MRI کارکردی و در پژوهش پیشین He این است که فکر کردن در مورد یک حرکت متفاوت، دسته جدیدی از سلولهای عصبی را فعال میکند. محققان در این پژوهش جدید حرکات ممکن را با استفاده از پردازش پیشرفته سیگنال دستهبندی کردند.

کاربر یک هلیکوپتر مجازی سه بعدی را با استفاده از امواج مغزی به پرواز در میآورد (Bin He / دانشگاه مینه سوتا)
این پژوهش بر مبنای تحقیقاتی است که He در سال ۲۰۱۱ منتشر کرده است. در آن پژوهش افراد قادر به پرواز یک کوادکوپتر مجازی با استفاده از فناوری EEG غیر تهاجمی بودند و در پژوهش بعدی وی، افراد یک کوادکوپتر فیزیکی را به پرواز درآوردند.
گام بعدی پژوهشهای He برای توسعه بیشتر این فناوری، استفاده از یک عضو مصنوعی رباتیک و کنترل شونده با مغز خواهد بود که به بدن بیمارانی که دچار سکته مغزی و یا فلج شدهاند، متصل میشود.
این پژوهش دانشگاه مینه سوتا توسط بنیاد ملی علوم (NSF)، مرکز ملی پزشکی مکمل و جایگزین، مؤسسه ملی تصویربرداری زیست پزشکی و مهندسی زیستی، مؤسسه ملی اختلالات عصبی و سکته مغزی و مؤسسه ملی بهداشت (NIH) تأمین مالی شده است.
هشت نفر از افراد سالم در جلسات تجربی این پژوهش و پوشیدن کلاه EEG شرکت داشتند. افراد به تدریج آموختند تا با تصور حرکت دست خود و بدون حرکت دادن دست واقعی، بازوی رباتیک را در فضای سه بعدی کنترل کنند. آنها با آموزش کنترل یک مکان نمای مجازی بر روی صفحه نمایش رایانه شروع کردند و سپس آموختند چگونه یک بازوی رباتیک را برای رسیدن به اشیاء و در دست گرفتن آنها در یک مکان ثابت روی میز کنترل کنند. در ادامه آنها قادر بودند تنها با تفکر بازوی رباتیک را برای رسیدن به اشیاء و در دست گرفتن آنها در مکانهای تصادفی بر روی یک میز کنترل کنند و اشیاء را از روی میز به یک قفسه انتقال دهند.
همه هشت نفر توانستند بازوی رباتیک را برای برداشتن اشیاء از مکان ثابت با میزان موفقیت بالاتر از ۸۰ درصد کنترل کنند و اشیاء را از روی میز به روی قفسه با میزان موفقیت بالاتر از ۷۰ درصد منتقل کنند.
خلاصه مقاله کنترل بازوی رباتیک برای دست گرفتن اشیاء با روش مبتنی بر EEG غیر تهاجمی
فناوریهای رابط مغز و رایانه (BCI) در تلاشند تا پلی بین مغز انسان و دستگاههای بیرونی ایجاد کنند. پژوهشهای پیشین در استفاده از BCI غیر تهاجمی برای کنترل اشیاء مجازی همچون مکان نمای رایانه و هلیکوپتر مجازی و اشیای دنیای واقعی همانند صندلی چرخدار و کوادکوپتر، وعدههای فناوری BCI را نشان داده است. اگرچه نمایش کنترل یک بازوی رباتیک برای دسترسی به اشیاء و در دست گرفتن آنها با استفاده از BCI غیر تهاجمی هنوز باقی مانده بود. در این مطالعه، ما متوجه شدیم که یک گروه ۱۳ نفره از افراد مایل و علاقمند، توانستند با استفاده از فعالیت مغز خود یک بازوی رباتیک را با دقت بالا برای انجام کارهایی که نیاز به درجههای مختلفی از آزادی دارد، هدایت کنند. افراد قادر به کنترل بازوی رباتیک با استفاده از فعالیت مغز و تنها پس از چند جلسه آموزش بودند و این توانایی خود را پس از چند ماه حفظ کرده بودند. نتایج ما قابلیت زیستپذیری انسان و اندام مصنوعی را با استفاده از فناوری BCI غیر تهاجمی نشان داد.
منبع: kurzweilai


