با پیشرفتهای علم رباتیک راه رفتن، سخن گفتن، شنیدن، دویدن، و حتی حس بویایی برای رباتها ممکن شده است. اما القای حس لامسه به رباتها کار دشواری است. روشهای موجود برای این کار محدودیتهایی دارد. این درحالی است که حس لامسه به خصوص برای در دست گرفتن اشیا نرم و برهمکنش با آنها بسیار مهم است. در صورتیکه به نحوهی شبیهسازی حس لامسه برای رباتها علاقمند هستید با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
چالش های ساخت پوست مصنوعی
برای کمی سازی حس لامسه در مهندسی باید دقیقا نیروی خارجی اعمال شده به یک حسگر لامسه را بدانید. همچنین موقعیت دقیق نیروی اعمال شده، زاویهی آن، و چگونگی اثر آن بر اشیا باید به دقت تشریح شود. پس از این باید تعداد دقیق حسگرهای لازم برای فعالسازی ربات را تعیین نمایید. ساخت پوست یک ربات که حاوی هزاران حسگر لامسه است، چالش مهندسی بزرگی است.
برای ساخت یک حسگر لامسه آگاهی و دانش کافی از برهمکنشهای فیزیکی انجام شده در هنگام لمس اشیا ضروری است. اما بزرگترین مانع ساخت یک حسگر لامسه تجهیزات الکترونیکی مورد نیاز است.
اندازه گیری نیرو در حسگر پوستی
حس لامسه معمولا به کمک حسگری که نیروی وارده را به یک سیگنال الکترونیکی ترجمه میکند، شبیه سازی میشود. برای تنظیم کردن سیگنالهای دیجیتال دادههای نیرو استفاده از یک مبدل پیزوالکتریک بسیار رایج است. هر چند محدودهی وسیعی از نیروها را میتوان به کمک این دستگاهها اندازهگیری نمود، محدودیتهای این دستگاهها مانع از کاربرد عملی آن برای ساخت پوست مصنوعی میشود. به طور خاص میتوان از زمان پاسخ زیاد آن نام برد.
انواع دیگری از حسگرها نیز وجود دارد. این حسگرها تغییرات جریان را به تغییراتی در ظرفیت خازنی یا مقاومت ترجمه میکنند. این فناوریها در گوشیهای لمسی تلفن همراه و موس یک لپتاپ وجود دارد.
حسگرهای نیروی نرم و انعطاف پذیر
پیشرفتهای اخیر فناوریهای حسگرهای آنها را برای استفاده در موارد معطف مناسب میسازد. این فناوری برای ساخت یک پوست مصنوعی ضروری است. اما بسیاری از این فناوریها در مجاورت رطوبت بیاستفاده خواهند شد. برای درک بهتر این موضوع سعی کنید با دستان خیس خود را روی صفحهی تلفن همراه استفاده کنید.
در حال حاضر نیازهای پزشکی موجود مطالعات روی حسگرها را توجیه میکند. به عنوان مثال پوست مصنوعی میتواند برای ذخیرهی واکنشهای بیماران به آسیب پوستی، بیحسی و خواب رفتگی استفاده شود. این اطلاعات برای ایجاد حس لامسه در دستهای مصنوعی نیز مفید است.
به تازگی پژوهشگران MIT و Harvard یک دستکش انعطافپذیر طراحی کردند. توزیع حسگرها روی سطح این دستکش یکنواخت است. این توزیع برای تشخیص شکل اشیا مناسب است. همچنین تخمین وزن، نرمی و الگوی روی شیئ نیز قابل تشخیص است.
پژوهشگران ۵۴۸ حسگر حساس به تنش و کرنش را روی این دستکش تعبیه نمودهاند. این حسگرها با آرایهای از الکترودهای ظریف در بافت دستکش تنیده شده و به یکدیگر متصل میشوند. این دستکش نخستین تلاش موفقیت آمیز برای ثبت سیگنالهای مربوط به اشیا بزرگ مقیاس است. همین امر اهمیت این دستکش را بیان میکند. کارکرد این دستکش در صنعت رباتیک در صورت موفقیت بسیار موثر خواهد بود.
با وجود موفقیت بسیار ذکر مجدد این نکته لازم است که این فناوری در مجاورت رطوبت کارایی خود را از دست میدهد.
نیروسنج اپتیکی چیست؟
برای بررسی مساله حسگرهای اپتیکی شکل جدیدی از حسگر به صورت لایهی نازک OLED، یا به صورت کامل organic LED، و یا OPD، organic photodiodes، نیاز است. حسگرهای OLED در تلفنهای همراه یا صفحات تلویزیون استفاده میشوند. هدف بدست معیاری از لامسه با اندازهگیری نیرو توسط یک روش اپتیکی است.
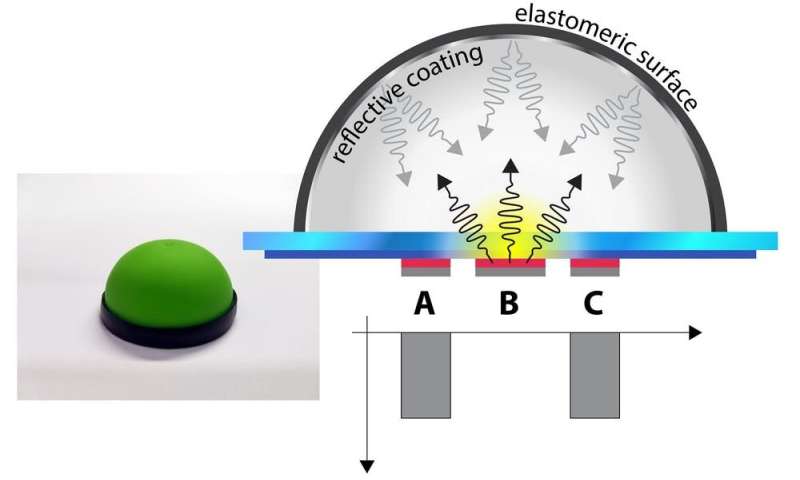
یک عنصر OLED افزون بر قابلیت تولید نور میتواند برای آشکارسازی نور نیز استفاده شود. با این اصل میتوان یک گنبد کوچک، مات، و منعطف با روکشی انعکاسی روی عناصر OLED ساخت. در صورتیکه گنبد شکل خود را حفظ کند نور پخش شده از مرکز یک پیکسل روی کلیهی پیکسلهای زیر گنبد به صورت یکنواخت اثر خواهد گذاشت.
در صورتیکه به طریقی گنبد فشرده شود، به طور مثال با لمس، و تغییر شکل دهد الگوی پخش نور روی سایر پیکسلها تغییر خواهد یافت و پیکسلها میزانهای متفاوتی از نور را آشکار میسازد. اگر دادههای مربوط به هزاران گنبد تلفیق شود میتوان نیرو را تخمین زد. این روش را میتوان برای ساختن حسگری که در مجاورت رطوبت نیز کارایی دارد، به کار برد.
بیشتر بخوانیم:
ترکیب حس لامسه و بینایی برای هدایت ربات ها توسط پژوهشگران CSAIL در MIT
بازگشت حس لامسه و توانایی گرفتن اشیا به افراد قطع عضو با دست بیونیک
منبع: techxplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


