پژوهشگران نرم افزار جدیدی ساختند که میتواند در سخت افزارهای کنونی ادغام شود. این کار به منظور استفاده از پاهایی مصنوعی رباتیک کنونی یا اسکلتهای بیرونی برای راه رفتن ایمن و طبیعیتر در کلیهی زمینهای ناهموار انجام گرفته است. این چارچوب جدید دید رایانهای را برای کنترل پای رباتیک به کار میگیرد. این امر شامل به کارگیری الگوریتمهای هوش مصنوعی است که به نرم افزار اجازه میدهد به نوعی عدم قطعیت را نیز وارد کار کند. برای آشنایی بیشتر با این نرم افزار و شیوه کنترل از شما دعوت میکنیم ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی را مطالعه نمایید.
تصمیم گیری برای راه رفتن بر پایه احتمال
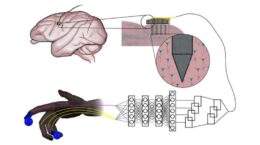
ادگار لوباتن، یکی از نویسندگان مقاله این طرح و دانشیار مهندسی کامپیوتر و الترونیک در دانشگاه ایالتی کارولینای شمالی گفته است : پای مصنوعی رباتیک پایین تنه باید بر اساس زمینی که کاربر روی آن گام برمیدارد رفتار کند. چارچوبی که ما ساختیم به هوش مصنوعی پای مصنوعی رباتیک اجازه میدهد که نوع زمین را پیش بینی کند. به این پیشبینی احتمالی هم نسبت داده میدهد و سپس این احتمال در تصمیم گیری دخالت داده میشود.
در نظر گرفتن انواع زمین برای راه رفتن
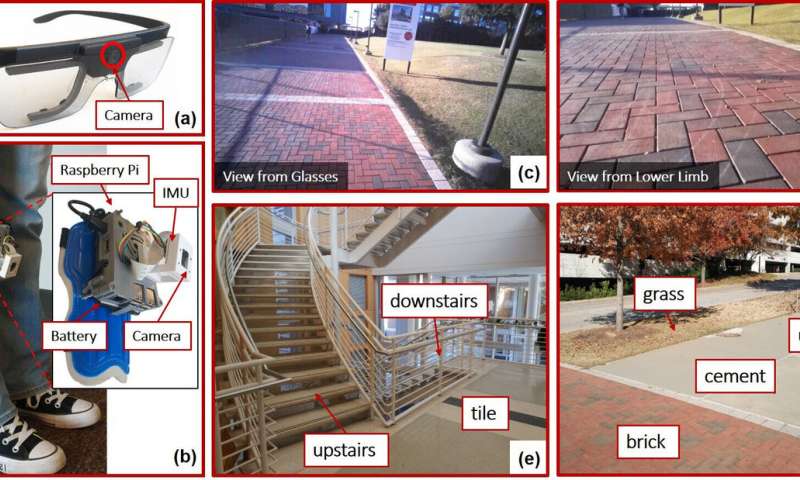
پژوهشگران بر شش نوع زمین برای سازگار شدن رفتار پای مصنوعی خود تمرکز کردند: کاشی، آجر، بتن، چمن، پله رو به بالا، پله رو به پایین.
به گفته Boxuan Zhong نخستین نویسنده مقاله این پژوهش و فارغالتحصیل دکتری از دانشگاه ایالتی کارولینای شمالی اگر میزان عدم قطعیت بالا باشد، هوش مصنوعی تصمیمی مخاطره آمیز نخواهد گرفت. در عوض کاربر را از نبود اعتماد کافی به پیشبینی موجود برای اخذ تصمیم و عمل به آن آگاه میسازد. همچنین پای مصنوعی میتواند به صورت پیشفرض به مد امن وارد شود.
استفاده از دو دوربین برای تصمیم گیری بهینه
این چهار چوب جدید عناصر نرم افزاری و سخت افزاری را به کار میگیرد. پژوهشگران این چهارچوب را برای اسکلتهای بیرونی پایین تنه یا پای مصنوعی رباتیک به کار بردهاند. اما اینک یک عنصر جدید نیز بر آن افزوده شده است: دوربین. در این پژوهش دوربین روی عینک و دوربین روی خود پای مصنوعی به کار گرفته شده است. پژوهشگران تخمین زدند که هوش مصنوعی تا چه حد از هر کدام از این دوربینها به صورت مجزا و در ترکیب با یکدیگر استفاده خواهد کرد.
دوربین روی پای مصنوعی برای تصمیم گیری کافی است
به گفته یکی دیگر از نویسندگان این پژوهش با نام Helen Huang ادغام دید رایانهای در سامانه کنترل رباتیک پوشیدنی حوزه نوینی در پژوهش است. هر دو دوربین به خوبی جوابگو هستند اما به قدرت محاسباتی زیادی نیاز است. تا حدی که این نیاز میتواند یک مانع باشد. اما به کارگیری دوربین روی پای مصنوعی به تنهایی برای پیش بینیهای کوتاه مدت به خوبی پاسخگو است. برای اینکه بفهمیم گام بعدی برای چه زمینی برداشته میشود این دوربین کافی است. Huang استاد مشترک مهندسی پزشکی در دانشکده مهندسی پزشکی دانشگاه کارولینای شمالی و همین دانشگاه در Chapel Hill است.
طراحی هوش مصنوعی پای مصنوعی، مهم ترین دستاورد پژوهشگران بوده است
مهمترین بخش این پژوهش خود هوش مصنوعی آن است. چرا که پژوهشگران این پژوهش موفق شدهاند راهی برای ارزشگذاری بهتر احتمالات دخیل در یادگیری عمیق بیابید و تصمیمگیری به کمک آن بیابند. این پیشرفت مسلما به صورت مستقیم روی پای مصنوعی طرح اثر داشته است. اما برای هر سامانه یادگیری عمیق دیگری نیز قابل استفاده است.
نحوه آموزش هوش مصنوعی
به منظور آموزش سامانه هوش مصنوعی پژوهشگران دوربین را افراد عادی متصل کردند. این کاربران به صورت عادی در فضاهای داخلی و خارج ساختمانها گام برمیداشتند. پژوهشگران سپس کارآمد بودن روش آموزش انجام شده را آزمودند. این کار با راه رفتن یک فرد که یک پای مصنوعی را با هوش مصنوعی آموزش دیده در همان محیطها به کار میبست، انجام شد.
دورنمای این پژوهش در آینده
این مدل در یک سامانه رباتیک به کار گرفته نشده است. به گفته Zhong پژوهشگران در حال کار برای کارآمد ساختن سامانه خود هستند. آنان امیدوارند در آینده دادههای ورودی کمتر و قدرت محاسباتی کمتری برای پردازش نیاز باشد.
بیشتر بخواینم:
بازیابی حس حرکتی در افراد قطع عضو با دست مصنوعی کلیولند
پیوند بازوی مصنوعی پیشرفته با عضو بیمار
استفاده از ربات های توانبخشی در منزل
منبع:techxplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»