دانشمندان EPFL یک پمپ کوچک ایجاد کردند که میتواند نقش مهمی در توسعه رباتهای نرم خودکار، اسکلتهای بیرونی (اگزواسکلتون) سبک وزن و لباسهای هوشمند بازی کند. انعطافپذیری، سکوت و وزن یک گرمی، این پمپ را جایگزین خوبی برای پمپهای سخت، پر سر و صدا و حجیم میکند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
پژوهشگران مؤسسه پلی تکنیک فدرال لوزان (EPFL) در سوئیس پمپ انعطافپذیر و کشسانی برای رباتیک نرم ایجاد کردند. پژوهش مربوط به این دستگاه در آخرین مجله Nature شرح داده شده است. وجود چنین دستگاهی بدان معنی است که رباتهای نرم دیگر نیازی به اتصال به پمپهای سخت ندارند و امکان تطبیق پذیری بیشتر در تجهیزات پزشکی نرم همچون عضلات مصنوعی و پوشیدنیهای کمکی فراهم میشود.
رباتهای نرم مزایای قابل توجهی در دستگاههای پزشکی دارند، زیرا با اطمینان بیشتری میتوانند بدون ایجاد صدمه با بافتهای انسانی تعامل داشته باشند. کاربرد این رباتها از دستگاههای کمکی نرم برای کمک به افراد دارای اختلال حرکتی گرفته تا عضلات مصنوعی و وسایل جراحی متغیر است.
به طور معمول چنین رباتهایی نیاز به فعالسازی دارند. یک پمپ مایع یا هوا را به قسمتهایی از ربات وارد میکند تا از این طریق ربات حرکت کند. پمپهای فعلی اغلب سخت هستند. آنها توسط یک لوله به ربات متصل میشوند و این موجب ایجاد محدودیت در مکان و حرکت رباتها میشود.

این پمپ نرم مدولار است. میتوان چندین پمپ را با هم ترکیب کرد تا رباتهای نرم بزرگتری را فعال کرد. اعتبار: Vito Cacucciolo / EPFL
ساخت پمپ منعطف و کشسان
پژوهشگران مستقر در سوئیس یک پمپ کاملاً نرم ساختهاند. این پمپ جدید میتواند جزئی از ربات نرم باشد. فناوری جدید منعطف و کشسان است، تنها یک گرم وزن دارد، حاوی الکترودهای نرم است و از انرژی بسیار کمی استفاده میکند.
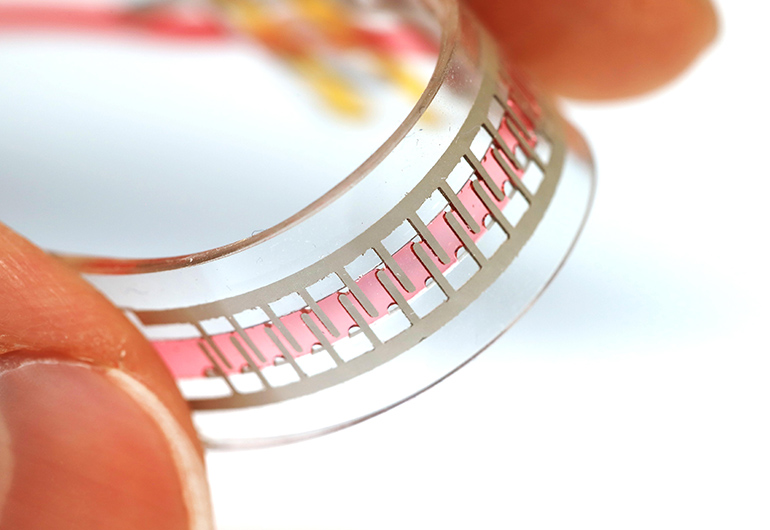
روشی که برای گردش مایعات خنک کننده درون ابر رایانهها استفاده میشود، الهام بخش طراحی این پمپ بوده است. در مرکز پمپ یک کانال یک میلی متری حاوی الکترودهای چاپی بسیاری است که در یک مایع دی الکتریک قرار دارند. اعمال ولتاژ در الکترودها موجب میشود که مایعات در پمپ کشیده شوند.
این پمپهای منعطف میتوانند به طور مستقیم با رباتهای نرم ادغام شوند. پس در صورت داشتن منبع تغذیه داخلی میتوانند بیسیم باشند. Herbert Shea، پژوهشگر درگیر در این پژوهش گفت: «اگر بخواهیم رباتهای بزرگتری را فعال کنیم، میتوانیم چندین پمپ را به هم وصل کنیم. ما این پژوهش را یک انقلاب در زمینه رباتیک نرم میدانیم».
توسعه عضلات مصنوعی در ژاپن
پژوهشگران در حال همکاری با یک گروه پژوهشی ژاپنی در آزمایشگاه Koichi Suzumori برای ادغام این فناوری در عضلات مصنوعی انعطافپذیر و اسکلت بیرونی نرم هستند. پژوهشگران با موفقیت پمپ خود را در نوعی انگشت رباتیک که بطور گسترده در آزمایشگاههای رباتیک نرم استفاده میشود، قرار دادند.
گروه EPFL همچنین یک دستکش پارچهای را با لولهها سازگار کرده است و نشان داده که میتوان مناطقی از دستکش را به دلخواه با استفاده از این پمپ گرم کرد. این برنامه قبلاً مورد توجه تعدادی از شرکتها قرار گرفته است.
بیشتر بخوانیم:
>>مدارهای دیجیتال نرم جایگزین مدارهای الکترونیکی سخت در ربات ها
>>بشنوید: آینده ی ربات های نرم الهام گرفته از طبیعت با کاربرد پزشکی
>>عضلات مصنوعی و پوشیدنی های رباتیک میتواند موجب استقلال حرکتی سالمندان شود
منبع: medgadget
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


