در این مقاله به معرفی اسکلتهای بیرونی ماژولار و فعال شرکت مکزیکی WeaRobot میپردازیم. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید. شرکت اسکلت بیرونی WeaRobot در دسامبر سال ۲۰۱۴ توسط دکتر ارنستو رودریگز لیل (Ernesto Rodriguez Leal) و دانشجویان دکترای او، ریکاردو رابرتز (Ricardo E. Roberts Ugrinovic) و ادواردو مارتینز (Eduardo Piña Martinez) تاسیس شد.

همکاری آنها در زمینهی رباتیک و بیومکانیک و فناوری لمسی (haptic) در آزمایشگاههای ملی رباتیک مکزیک شرایط را برای تاسیس شرکت WeaRobot فراهم کرد. WeaRobot با حمایت شورای علمی و فناوری مکزیک (CONACYT) و موسسه ملی کارآفرینی (INADEM) به تحقیق و توسعه پرداختند و نتیجهی پژوهش آنها، ساخت نسخهی اولیه اسکلت بیرونی ماژولار با هدف توانبخشی اندام بالاتنه و کمک حرکتی بود. هماکنون این تیم به توسعهی یک اسکلت بیرونی کامل مشغول است. این اسکلت بیرونی کامل توسط سیگنالهای مغز و ماهیچه کنترل میشود. WeaRobot از فناوری واقعیت مجازی و افزوده نیز برای فراهم کردن برنامههای توانبخشی کاربران بهره میبرد. این اسکلت بیرونی در رقابت جام جهانی رباتیک سال ۲۰۱۶ برنده بخش هوش مصنوعی و رباتیک شده است.
اسکلت بیرونی ماژولار غیرفعال MRLN-0
اسکلت بیرونی WeaRobot در چهار نسخهی MRLN-0، MRLN-1، MRLN-2 و MRLN-3 تولید شده است. نسخهی MRLN-0 یک اسکلت بیرونی ماژولار غیرفعال است که با کمک حسگرهای مختلف موقعیت بدن را ردیابی میکند. اطلاعات مکان و سرعت و شتاب از طریق ارتباط بیسیم به رایانه و گوشی هوشمند ارسال میشود. اطلاعات دیگری مانند سیگنالهای EMG از حسگرهای پوشدنی تعبیه شده و سیگنال مغزی ECG از طریق هدستها به دست میآید. از کاربردهای اسکلت بیرونی مدل MRLN-0 میتوان موارد زیر را نام برد:
کنترل رایانه و ربات از راه دور
صنعت بازی
ردیابی حرکت و پارامترهای سلامت
ردیابی مهارت حرکتی درشت (Gross motor) در این حرکات نیرو نقش عمده را دارد . یعنی حرکاتی که مستلزم هماهنگی دقیق عضلات به هنگام انجام اعمال درشت است.
اسکلت بیرونی ماژولار فعال مبتنی بر فناوری لمسی MRLN-1

نسخهی MRLN-1 یک اسکلت بیرونی ماژولار فناوری لمسی است که با کمک محرکهای تعبیه شده توانایی حس کردن نیروی بازخوردی از کاربر و تعامل با او را دارد. این مدل تجربهای مبتنی بر حسگرها و فناوری لمسی را فراهم میکند. این اسکلت بیرونی برای کاربردهای زیر قابل استفاده است:
کنترل رایانه و ربات از راه دور
بازیهای تعاملی
تناسب اندام و ورزش
شبیه سازی نیروی جاذبه در فضا
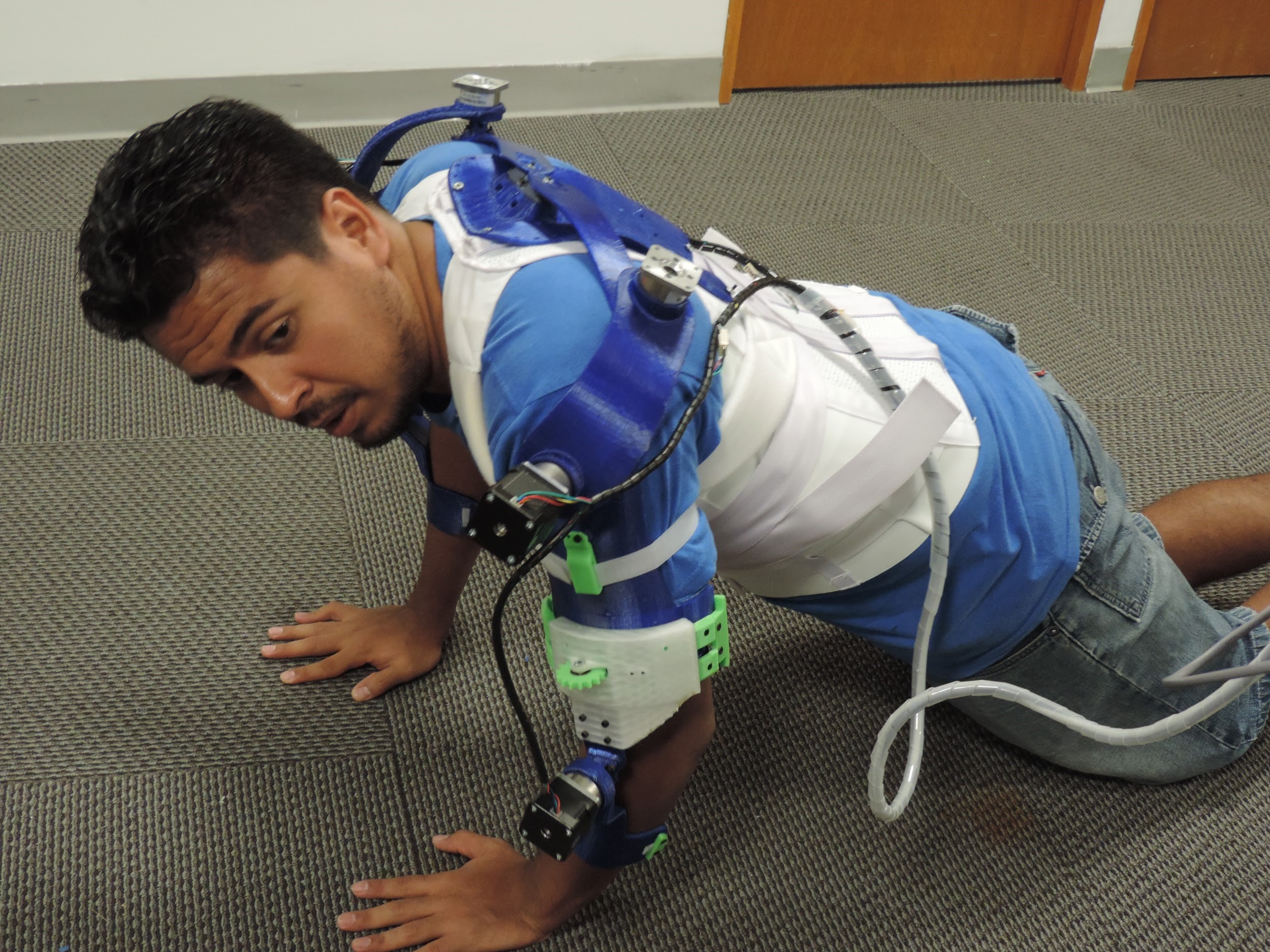
اسکلت بیرونی ماژولار فعال کمک حرکتیMRLN-2

نسخهی MRLN-2 یک اسکلت بیرونی ماژولار فعال کمک حرکتی به شمار میآید. این اسکلت بیرونی از سیگنالهای ماهیچهای و مغزی در راستای پیش بینی قصد حرکتی کاربر بهره میبرد. این فرآیند با هدف فراهم کردن گشتاور لازم در مفاصل برای انجام کارهای روزمره اجرا میشود.
اسکلت بیرونی ماژولار فعال توانبخشی با هدست واقعیت مجازی MRLN-3

مدل MRLN-3 یک نسخهی اسکلت بیرونی ماژولار فعال توانبخشی مبتنی بر واقعیت مجازی و افزوده است. در واقع نسخهی MRLN-3 یک اسکلت بیرونی پزشکی همراه با هدست VR/AR است. هدست VR/AR برنامههای توانبخشی تعاملی را برای کاربر فراهم میکند. عملکرد هر جلسه توانبخشی ثبت میشود و با پزشک به اشتراک گذاشته میشود. سیگنالهای ماهیچهای EMG و مغزی ECG ثبت شده، روند بهبود عملکرد کاربر را نشان میدهند.

به طور کلی میتوان گفت ویژگی ماژولار اسکلت بیرونی WeaRobot باعث میشود بتوان یک اسکلت بیرونی کامل را در مدت زمان خیلی کم آماده کرد. اسکلت بیرونی هرکدام از مفاصل زانو و شانه و آرنج به طور جداگانه قابل استفاده است. همچنین بخشهای مختلف اسکلت بیرونی با آناتومی بدن کاربر سازگاری دارد. سیگنالهای مغزی ECG و ماهیچهای EMG برای کمک به حرکت کاربر بازخورد دارند. تجربهی فناوری لمسی با هدف ارائه برنامههای توانبخشی در این اسکلت بیرونی به کار میرود.
بیشتر بخوانید:
>>توانبخشی فیزیکی با اسکلت بیرونی و واقعیت مجازی
>>معرفی اسکلت بیرونی مایوالکتریک بالاتنه شرکت Myomo
منبع: wearobot
استفاده و بازنشر این نوشتار تنها با ذکر لینک منبع و نام «مجلهی فناوریهای توان افزا و پوشیدنی» مجاز است.