پژوهشگران دانشگاه کاسینو و جنوب لاتزیو در ایتالیا اخیراً یک ساختار پیشرفته ایجاد کردهاند که کنترل عملکرد یک ربات کمکی را از طریق یک رابط مغز و رایانه مبتنی بر P300 امکان پذیر میکند. این ساختار میتواند زندگی افراد مبتلا به ناتوانی شدید حرکتی را آسانتر کند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
سامانه جدیدی که توسط پژوهشگران ساخته شده است مبتنی بر یک بازوی رباتیک سبک است. در اصل این ربات از طریق یک رابط مغز و رایانه مبتنی بر P300، دستورات سطح بالایی را از کاربران دریافت میکند. در علوم اعصاب، امواج P300 پاسخهایی هستند که در طی فرآیند تصمیمگیری توسط مغز انسان ایجاد میشود.
Filippo Arrichiello، یکی از پژوهشگران این مطالعه، گفت: «هدف اصلی کار ما تحقق سامانهای بود که به کاربران امکان میدهد دستورالعملهای سطح بالایی را از طریق رابطهای مغز و رایانه (BCI) تولید کنند. این دستورالعملها به دستورات حرکتی برای بازوی رباتیک ترجمه میشود».
رابط مغز و رایانه مبتنی بر p300
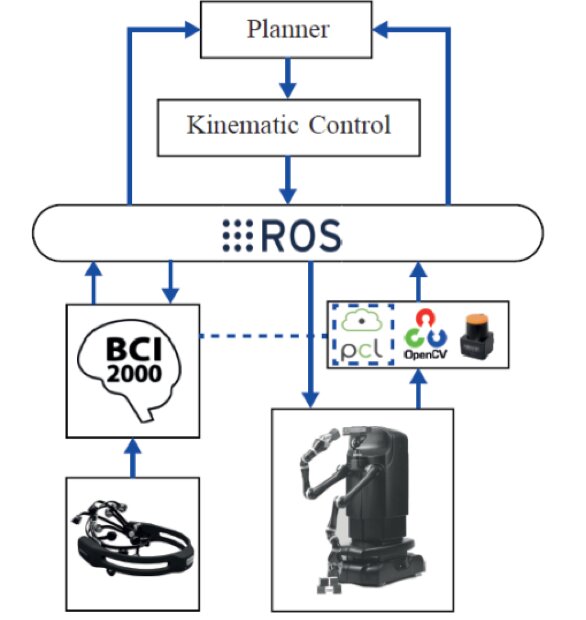
ساختاری که توسط پژوهشگران ایجاد شده است دارای سه مؤلفه اصلی است: یک سامانه رابط مغز و رایانه مبتنی برP300 ، یک ربات کمکی و یک سامانه ادراکی. Arrichiello و همکارانش این سه عنصر را در محیط ROS، یک نرم افزار مشهور واسطهای برای برنامههای رباتیک، ادغام کردند.
نخستین مؤلفه این ساختار یعنی رابط مغز و رایانه مبتنی بر P300، فعالیت الکتریکی موجود در مغز را از طریق الکتروانسفالوگرافی (EEG) اندازه میگیرد. سپس این سیگنالهای مغزی را به دستوراتی ترجمه میکند تا بتوان رایانه را تغذیه کرد.
Arrichiello توضیح داد: «نمونههای P300 برای رابط مغز و رایانه از واکنش مغز کاربر به محرکهای خارجی بوجود میآید. درواقع از چشمک زدن به عنوان واکنشی برای انتخاب نمادهای روی صفحه نمایش استفاده میشود. این به کاربر اجازه میدهد تا گزینه مورد نظر خود را از میان عناصر از پیش تعریف شده انتخاب کند و پیامهای سطح بالایی را برای ربات ارسال کند».
پژوهشگران برای انجام اقدامات مورد نظر کاربران، از یک بازوی رباتیک سبک به نام Kinova Jaco استفاده کردند. نرمافزار کنترل ربات کمکی، دستورالعملهای سطح بالایی را ایجاد میکند که توسط کاربر از طریق رابط مغز و رایانه انتخاب شده است. این دستورالعملها موجب حرکت ربات میشود.

Arrichiello گفت: «ساختار کنترلی که ما توسعه دادیم به ربات اجازه میدهد تا به اهداف متعدد و اولویتدار دست پیدا کند. یعنی انجام وظیفه و جلوگیری از برخورد با کاربر و یا موانع خارجی ضمن احترام به محدودیتهایی همچون محدودیت مکانیکی ربات».
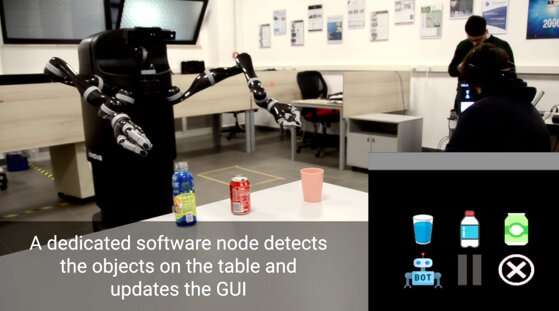
مؤلفه نهایی این ساختار که توسط Arrichiello و همکارانش ابداع شده، یک سامانه ادراکی است. این سامانه بر پایه یک حسگر RGB-D (یعنی Microsoft Kinect One) بنا شده است. این سامانه از حسگر Kinect One برای شناسایی و مکانیابی اشیایی که توسط ربات باید جابجا شوند، استفاده میکند. این حسگر همچنین میتواند چهره کاربر را تشخیص داده، وضعیت دهان را تخمین زده و موانع را تشخیص دهد.
کاربردها
Arrichiello گفت: «پیامدهای عملی مطالعه ما کاملاً صریح و جاه طلبانه است. هدف نهایی آن حرکت در جهت ایجاد یک مجموعه رباتیک قابل اعتماد و مؤثر است. که در نهایت میتواند به کاربران دارای اختلالات شدید حرکتی کمک کند تا کارهای روزمره را بطور مستقل و بدون پشتیبانی مداوم یک مراقب انجام دهند».
Arrichiello و همکارانش برای ارزیابی عملکرد و اثربخشی سامانه خود یک سری آزمایشهای اولیه انجام دادند. در آینده، سامانه آنها میتواند زندگی افراد تحت تأثیر ناتوانیهای حرکتی و جراحات جسمی را تغییر دهد و به آنها اجازه دهد انواع مختلفی از کارها را انجام دهند.
«پژوهشهای آینده در درجه اول با هدف تقویت قابلیت اطمینان و اعتماد سامانه خواهد بود. افزون بر این، ما نمونههای مختلف رابطهای مغز و رایانه را آزمایش خواهیم کرد. یعنی روش متفاوتی برای استفاده از رابط مغز و رایانه. برای نمونه استفاده از نمونههای مبتنی بر تصور حرکتی. تا بتوانیم مناسبترین آنها را برای برنامههای دوربُرد شناسایی کنیم».


بیشتر بخوانیم:
>> کنترل صندلی چرخدار، وسایل نقلیه و رایانه با یک رابط مغز و ماشین پوشیدنی
>> ساخت ربات های یاری رسان توسط شرکت تویوتا
منبع: techxplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


