آزمایشگاه سامانههای بیومکاترونیک دانشگاه سایمون فریزر (SFU) یک اسکلت بیرونی پایینتنه پیشرفته به نام Exomotion طراحی کرده است که انواع حرکتهای زانو و ران را تقلید میکند و راه رفتن طبیعی را برای افراد معلول ممکن میسازد. دکتر سیامک ارزانپور به همراه دکتر ادوارد پارک (Edward Park) سرپرستی گروه سازنده اسکلت بیرونی رباتیک را بر عهده دارند. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
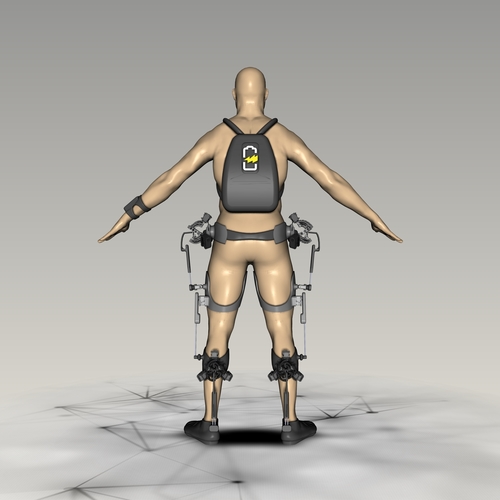
هدف گروه، ساخت اسکلت بیرونی و آزمایش نمونهی نخست آن طی چند هفته است. سپس آزمایشها در طیف گستردهتری در سال ۲۰۱۹ ادامه پیدا خواهد کرد. سال ۲۰۲۰ نیز زمان تولید این اسکلت بیرونی در نظرگرفته شده است. اسکلت بیرونی رباتیک Exomotion همانند حرکتهای بدن فرد سالم رفتار میکند. این اسکلت بیرونی طیف گستردهای از حرکتها را برای کاربر فراهم میکند. بنابراین کاربر میتواند تعادل را حفظ و راه رفتن طبیعی را تجربه کند.
کلوئی انگوس (Chloe Angus) سه سال پیش متوجه شد دیگر نمیتواند راه برود. پزشکان یک تومور خوشخیم در ستون فقرات او تشخیص دادند. امکان جراحی تومور وجود نداشت و کلوئی از آن زمان از ویلچر استفاده میکند. کلوئی طراح مد شناخته شدهی کانادایی پس از این اتفاق به دنبال یک اسکلت بیرونی بود تا به او در راه رفتن کمک کند و استقلال را دوباره به او بازگرداند. او در شرکت اسپین آف دانشگاه سایمون فریزر به نام Human in Motion سرمایهگذاری کرده است و با مهارت طراحی خود در طراحی ظاهر اسکلت بیرونی همکاری کرد. شرکت Human in Motion توسط پژوهشگران دانشگاه SFU دکتر سیامک ارزانپور و دکتر ادوارد پارک تاسیس شده است.
کلوئی امیدوار است روزی با پوشیدن اسکلت بیرونی بتواند دوباره به صورت مستقل راه برود. استفاده از ویلچر برای مدت طولانی در طول روز تاثیر منفی بر سلامتی دارد. زخمهای ناشی از فشار و نبود گردش خون درمانی هزینهبر دارند و خطرناک هستند. شرکت Human in Motion به تازگی برندهی جایزهی ۵۰۰۰۰ دلاری رقابت Mobility Unlimited شرکت تویوتا شده است.
برای آشنایی بیشتر با اعضای گروه دکتر ارزانپور و کسب اطلاع از حوزهی فعالیت آنان به این صفحه مراجعه نمایید.
دکترسیامک ارزانپور- اسکلت بیرونی پایین تنه Exomotion
بیشتر بخوانیم:
>>آشنایی با اسکلت بیرونی Keeogo
>>چرا باید از فناوری اسکلت بیرونی پوشیدنی استفاده کنیم؟
منبع : vancouversun
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


