تصور کنید با پوشیدن یک دستکش بتوانید توپ کوچکی را از راه دور و با کمک یک بازوی رباتیک در دست بگیرید و هر حرکتی که با دست خود انجام میدهید، بازوی رباتیک از مایلها فاصله با توپ انجام دهد. با ربات پیشرفتهی Shadow Hand این تصور به واقعیت تبدیل شده است. هنگامیکه دست رباتیک Shadow Hand و توپ در لندن قرار داشت، شخصی در سنفرانسیسکو با پوشیدن دستکش، توپ را در دستان خود احساس کرد. تاکنون رباتهای جراحی از راه دور و رباتهای خنثی کردن بمب به عنوان رباتهای هدایت از راه دور شناخته میشدند. این رباتها در مقایسه با بازوی رباتیک Shadow Hand بسیار ساده هستند. برای آشنایی با دست رباتیک پیشرفته Shadow Hand با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.

در هر انگشت ربات پیشرفتهی Shadow Hand حسگری وجود دارد که با کمک آن ربات احساس گرفتن توپ را منتقل میکند. با کمک این ربات و دستکش میتوان به این احساس در هر نقطهی جهان دست پیدا کرد. شخص میتواند در سنفرانسیسکو توپ را در دستان خود احساس کند. ویژگی جالب Shadow Hand، تاخیر بسیار کم میان حرکت دست در دستکش و دست رباتیک از راه دور است. با پوشیدن دستکش، احساس گرفتن توپ در دست بازتولید میشود. دست رباتیک Shadow Hand را میتوان در گروه رباتهای هدایت از راه دور یا تلهرباتها (telerobotics) دستهبندی کرد. هر رباتی که بتواند در حوزهی گستردهای از فضای پیرامون، توسط یک سامانهی رایانهای یا هر پردازشگر دیگری فرمان گرفته و هدایت شود، در گروه تلهرباتیک قرار میگیرد.

سامانهی دست رباتیک هدایت از راه دور با تلاش سه گروه پژوهشی متفاوت طراحی شده است. هر کدام از گروهها بر بخش خاصی از این سامانه تمرکز داشته است.
۱) دستکش با بازخورد لمسی را شرکت HaptX سازندهی سختافزار رایانه واقع در واشنگتن طراحی کرده است.
۲) دست رباتیک را شرکت Shadow Robot در انگلستان توسعه داده است.
۳)فناوری حسگرهای به کار رفته در انگشتان دست رباتیک نیز توسط شرکت SynTouch در کالیفرنیا تولید شده است.
همچنین شرکت هواپیمایی ژاپنی آل نیپون ایرویز (All Nippon Airways) سرمایهگذاری این پروژه را بر عهده دارد.
دست رباتیک Shadow Robot
دست رباتیک Shadow Hand مشابه دست رباتیک شخصیت فیلم سینمایی نابودگر (Terminator) است. حرکتهای دست با ظرافت بسیار و همانند حرکت دست واقعی انجام میشود. چگونگی شکل دادن کف دست، چگونگی حرکت انگشت شست و چگونگی پوشاندن مفاصل با پوست از نکاتی است که هنوز در طراحی این سامانه در نظر گرفته نشده است. ریچ واکر (Rich Walker) مدیرعامل شرکت Shadow Robot دربارهی پروژهی طراحی سامانه دست رباتیک هدایت از راه دور بر این باور است که اجرای چنین پروژهای کمک میکند مواردی که باید در طراحی در نظر گرفته شود و مواردی که نیاز جدی به طراحی آنها نیست مشخص شود.
انگشتان رباتیک دارای حس لامسه
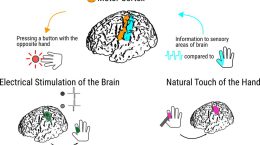
در هر کدام از انگشتان، ۲۴ الکترود در پوششی از جنس سیلیکون قرار گرفتهاند. میان الکترودها و روکش سیلیکونی، محلولی قرار دارد که با فشار بر انگشت، الکترودها تغییر مقاومت ناشی از فشار بر انگشت را شناسایی میکنند. این توانایی، لمس اجسام از طریق دست رباتیک را به دقت بسیار خوبی امکانپذیر میکند.
تفاوت عملکرد دست رباتیک دارای حس لامسه با دست واقعی
دو دوربین در کنار دست رباتیک قرار میگیرد. یک دوربین بر تصویر بازو تمرکز دارد و دیگری جسمی را که دست رباتیک قصد دارد بردارد تصویربرداری میکند. در واقعیت، در برداشتن جسمی با دست واقعی از روی میز چنین روندی وجود ندارد. ما با مشاهدهی مستقیم جسم دست خود را منطبق با جسم حرکت میدهیم. در این پروژه، با کمک دو دوربین در ابتدا محل قرارگیری جسم را مشاهده میکنیم و پس از برداشتن جسم با دست رباتیک، تصویر دوربین دوم در نظر گرفته میشود.
Michael Eichermueller سرپرست پروژه در شرکت HaptX توضیح میدهد با لمس ظریف جسم، کاربر حرکت پوست را بر انگشتان دستکش احساس میکند. با فشار بیشتر بر جسم، حرکت انگشتان دستکش محدود میشود و احساس میشود جسم در دست قرار گرفته است در حالی که هیچ جسمی در دست وجود ندارد. بازتولید حس لامسه به گونهای که جنس و نرمی و سختی جسم احساس شود، به ظرافت بسیاری نیاز دارد. این نوع حس لامسه با بازخورد حسی که تا به حال تجربه کردیم متفاوت است. ما تنها بازخورد لمسی ناشی از ارتعاش کنترلهای بازی و یا گوشی همراه را تجربه کردهایم.
Jake Rubin، بنیانگذار و مدیرعامل شرکت HaptX میگوید انسان دارای حس لامسهی دقیق و ظریفی است که فشار و نیروی وارد بر دست از سوی جسم را به خوبی حس میکند و میتواند کارها را با ظرافت و سرعت انجام دهد. فناوری باز تولید حس لامسه هنوز در ابتدای مسیر است. وعدهی بزرگ دور نگهداشتن انسانها از موقعیتهای خطرناک با هدایت رباتها از راه دور در حال تحقق یافتن است. دست رباتیک Shadow Hand هنوز کامل نیست اما روزی خواهد رسید که رباتهای هدایت از راه دور را به مناطق خطرناک میفرستیم و ما با ظرافت و دقت زیاد آنها را هدایت میکنیم. رباتها بدون حس لامسه باید در شرایطی استفاده شوند که محیط پیرامون برای ربات شناخته شده باشد. با رباتهای دارای حس لامسه، ما در حال تجربهی دنیای جدیدی هستیم.
در همین زمینه بخوانیم:
>>کاربرد فناوری واقعیت مجازی در کنترل رباتها از راه دور
>>بازگشت حس لامسه و توانایی گرفتن اشیا به افراد قطع عضو با دست بیونیک
>>تماشا کنید: ربات کنترل از راه دور دیزنی با دقت و ظرافتی همانند انسان
منبع: wired
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»