اسکلت بیرونی حین حمل اجسام سنگین، مانع آسیب دیدگی و کاهش خستگی افراد میشود. اما، به گفته پژوهشگران دانشگاه ویسکانسین-مدیسون و دانشگاه هاروارد، همهی افرادی که به ربات پوشیدنی نیاز دارند نمیتوانند به سرعت از این کمک بهره ببرند. یکی از چالشها، بررسی و نظارت بر اسکلت بیرونی در دنیای واقعی است. پژوهشگران باید به طور دقیق بدانند که اسکلت بیرونی چه تأثیری بر کاربر دارد. کلید حل این چالش حسگرهای پوشیدنی است. با مجله فناوریهای پوشیدنی و توانافزا همراه باشید.
تحقق پتانسیل کامل اسکلت بیرونی در محیطهای واقعی
پژوهشگران دانشگاه ویسکانسین-مدیسون و دانشگاه هاروارد برای نخستین بار، از یک حسگر پوشیدنی منحصر به فرد برای اندازهگیری مستقیم نیروی وارد بر تاندون آشیل افرادی استفاده کرد که کوله پشتی سنگینی را حمل میکردند. پژوهشگران آزمایشهای بیومکانیکی دقیقی را در آزمایشگاه انجام دادند. این حسگر به گروه اجازه داد تا آزمایشهای بیشتری در فضای باز روی افراد انجام دهند تا بررسیها در دنیای واقعی نیز ادامه داشته باشد. این گروه نتایج خود را در ۱۹ اکتبر ۲۰۲۲ در مجله Science Robotics منتشر کرد.
Dylan Schmitz، مهندس مکانیک دانشگاه ویسکانسین-مدیسون و نخستین نویسنده مقاله میگوید: «این هیجان انگیز است که ما توانستیم از یک اسکلت بیرونی در فضای باز استفاده کنیم و نیروی وارد بر تاندون آشیل را اندازه بگیریم. این گام بزرگی در جهت تحقق پتانسیل کامل اسکلتهای بیرونی در محیطهای واقعی است».
موارد خاصی وجود دارد که داشتن یک اسکلت بیرونی با محدودیت آزمایشگاهی همچنان یک مزیت است – مانند کار با بیماران در یک محیط بالینی- اما اگر میخواهید این دستگاهها را با افراد به خانه بفرستید، یا اگر شخصی بخواهد یکی از آنها را برای استفاده شخصی بخرد، درک شیوه عملکرد اسکلت بیرونی در محیطهای مختلف مهم است.
یافتههای پژوهشگران بر اهمیت سفارشیسازی اسکلتهای بیرونی برای کاربر آن تأکید میکند تا بتواند در محیطهای واقعی مفیدتر باشد.
اسکلتهای بیرونی تغییر خاصی را در بیومکانیک کاربر ایجاد میکنند. برای نمونه، یک دستگاه رباتیک که روی مچ پا پوشیده میشود، میتواند برنامهریزی شود تا درست در زمان مناسب حین راه رفتن کشیده شود و بار روی ماهیچههای ساق پا و تاندون آشیل کاهش یابد.
تاکنون، ایجاد اثر مطلوب بر روی کاربر همچنان چالش برانگیز بوده است و راه خوبی برای اندازهگیری مستقیم تغییرات روی بافت عضلانی و تاندون که هنگام استفاده از اسکلت بیرونی رخ میدهد، وجود نداشته است.

روش آزمایش
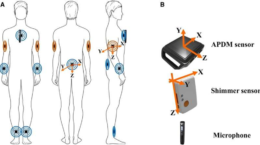
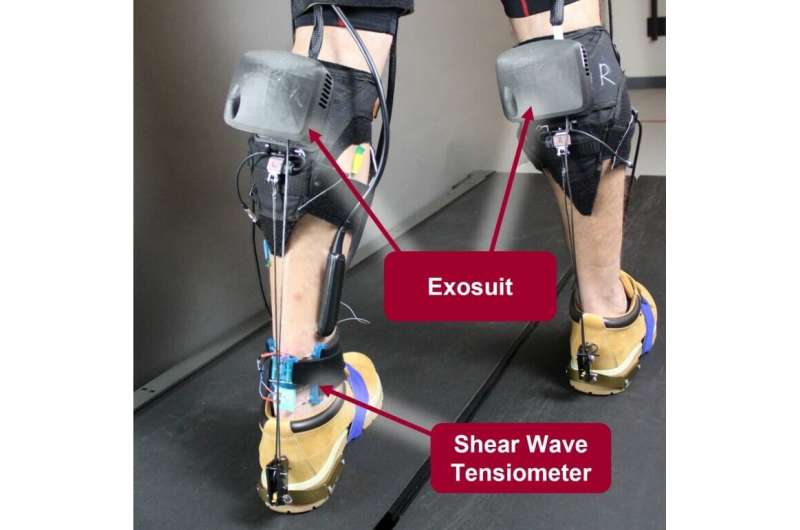
گروه پژوهشی دانشگاه ویسکانسین-مدیسون و هاروارد این چالش را با استفاده از یک حسگر پوشیدنی منحصربفرد به نام تانسیومتر حل کردهاند. این دستگاه ساده و غیرتهاجمی که توسط مهندسان دانشگاه ویسکانسین-مدیسون توسعه یافته و نخستین بار در سال ۲۰۱۸ در Nature Communications معرفی شد، به راحتی از روی پوست روی تاندون نصب میشود. تانسیومتر پژوهشگران را قادر میسازد تا به طور مستقیم نیرو و فشار وارد بر تاندون را هنگام حرکت، ارزیابی کنند.
در مطالعه پژوهشگران، هشت شرکتکننده یک اسکلت بیرونی قابل حمل از پارچههای نرم و یک محرک که توسط پژوهشگران هاروارد ساخته شده بود را پوشیدند. شرکتکنندگان که همگی جوانان سالم بودند، در حالی که کولهپشتی سنگینی را با خود حمل میکردند، روی یک تردمیل راه میرفتند. اسکلت بیرونی نیز سطوح مختلفی از کمک را ارائه میکرد. در طول این آزمایشها، پژوهشگران چندین پارامتر بیومکانیکی را اندازهگیری کردند و همچنین از تانسیومتر برای اندازهگیری مستقیم بار روی تاندون آشیل استفاده کردند.
نتایج
همانطور که پیشبینی میشد، پژوهشگران دریافتند با افزودن وزن به کوله پشتی، فشار روی تاندون آشیل افزایش مییابد. با این حال، زمانی که شرکتکنندگان برای کمک به حمل بار، اسکلت بیرونی را پوشیدند، نتایج چندان قابل پیشبینی نبود. برای برخی از شرکتکنندگان، اسکلت بیرونی نیروی وارده به تاندون آشیل را حین راه رفتن بهطور قابلتوجهی کاهش میداد. در واقع، انگار کولهپشتی سنگینی حمل نمیکنند.
اما سایر شرکتکنندگان تغییر کمی در نیروی تاندون آشیل دیدند که برخلاف انتظار پژوهشگران بود. Schmitz میگوید این نتایج مختلف میتواند تا حدی به دلیل تنوع در بین افراد باشد، زیرا افراد به کمکهای بیرونی اعمالشده واکنش متفاوتی نشان میدهند.
Schmitz میگوید: «افراد مختلف به روشهای متفاوتی نسبت به اسکلتهای بیرونی واکنش نشان میدهند، بنابراین نمیتوانیم فرض کنیم که یک کنترلکننده اسکلت بیرونی وجود دارد که برای همه کار میکند».
«این پژوهش اهمیت اندازهگیری مستقیم نیروهای عضلانی و تاندون را نشان میدهد تا اطمینان حاصل شود که اسکلت بیرونی موجب تغییرات بیومکانیکی مورد انتظار میشود. تانسیومتر ما این اندازهگیریها را امکانپذیر میکند و میتوان از آن به عنوان ابزاری قدرتمند برای تنظیم کنترل کنندههای اسکلت بیرونی در محیطهای مختلف استفاده کرد».
>> کمک ۳ میلیون دلاری به پژوهش های رباتیک در هاروارد
>> بازدید بیل گیتس از آزمایشگاه رباتیک هاروارد : از لباس بیرونی نرم تا میکروربات پرنده
منبع: techxplore.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»