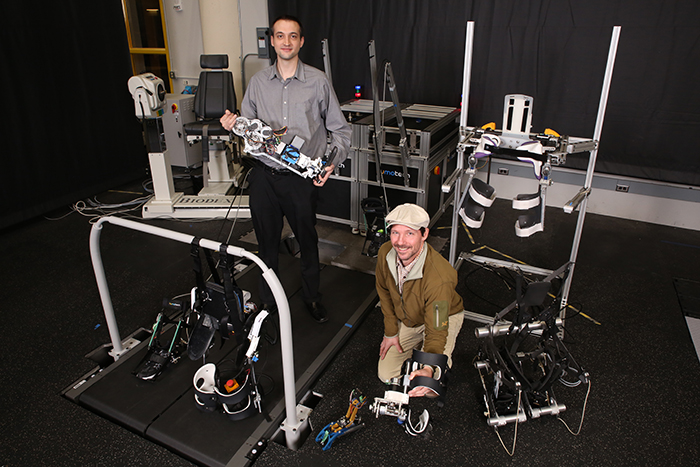
Aaron Young و Greg Sawicki از زوایای مختلفی به رباتیک نگاه میکنند اما هدف آنها یکسان است، آنها میخواهند دستگاههای رباتیک پوشیدنی تولید کنند که به افراد در حفظ یا افزایش تحرک خود کمک کند. آزمایشگاههای آنها در دانشکده مهندسی مکانیک جورج دبلیو وودروف در دانشگاه جورجیا تک در حال ایجاد زمینه برای دستگاههای مختلفی است که میتواند به کودکان، بیماران سکته مغزی، سالخوردگان و افراد قطع عضو کمک کند تا استقلال بیشتری کسب کنند و با راحتی و آسایش بیشتری حرکت کنند. برای آشنایی بیشتر با این پروژهها با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
Sawicki میگوید: «هدف من در آزمایشگاه اطمینان از این است که افراد آنچه را میخواهند و تا زمانی که میخواهند انجام دهند. این ممکن است یک چالش بزرگ باشد، اما یک اصل است، با ایجاد موقعیت برای ادامه حرکت افراد، آنها را شاد کنید».
Aaron Young به عنوان متخصص کنترل روی چگونگی ارتباط بدن انسان با دستگاه رباتیک به این چالشها نزدیک میشود. بدن انسان هر بار که شخص حرکت میکند سیگنالهای بیشماری را پردازش میکند، بنابراین او در تلاش است تا سیگنالهای عصبی را به فرامین مختلفی برای اسکلتهای بیرونی و پروتزها ترجمه کند که میتوانند همانند عضوی از بدن به صورت یکپارچه عمل کنند.
Young میگوید: «من همیشه به جنبه کنترل دستگاهها علاقهمند بودم، میفهمیدم که چگونه سیگنالهای بیولوژیکی یا سیگنالهای عصبی را از انسان بگیرم و از آن برای کنترل دستگاههای رباتیک استفاده کنم. این واقعاً تمرکز من به عنوان یک دانشجوی تحصیلات تکمیلی در Northwester بود و موجب شد که من به زمینه تقویت انسان و ایجاد حمایت با پروتزها و اسکلتهای بیرونی روی آورم».
«من در تلاش هستم درک کنم چگونه انسان را با فناوری رباتیک کمکی ادغام کنم. بخش عمدهای از این تمرکز بر روی چیزی است که ما آن را تشخیص قصد مینامیم. که تلاش برای درک کارهایی است که فرد سعی در انجام آن دارد و سپس استفاده از موارد مختلف هوش مصنوعی و روشهای یادگیری ماشین برای گرفتن اطلاعات حسگری از انسان و ربات و استفاده از آنها برای کمک مناسب».
بهبود تحرک با فناوری پوشیدنی
با تمرکز Young روی رابط انسان و ماشین و سامانههای کنترلی، Sawicki به مکانیک عصبی و انرژی حرکتی انسان و چگونگی تقویت حرکت با فناوری پوشیدنی نگاه میکند. او که یک دونده و دوچرخه سوار مشتاق است، همیشه مجذوب کارآیی حرکت بوده و متمرکز بر یافتن راههایی برای بازگرداندن این کارآیی به افراد دچار اختلال حرکتی است. با اینکار افراد میتوانند سبک زندگی فعالتری را در مدت زمان طولانیتری داشته باشند. Sawicki همچنین به بررسی تأثیر دستگاههای پوشیدنی بر روی بدن میپردازد، چه از نظر هزینه انرژی و یا اینکه دستگاهی که به مچ پای فرد متصل است، روی زانو یا ران چه تأثیری میگذارد».
Sawicki میگوید: «هنگامیکه من درگیر رباتیک پوشیدنی شدم، دیدم که ما در حال اتصال چیزی به خارج از یک ساختار بسیار پیچیده، بدن انسان، هستیم. و اگر به هیچ وجه به آنچه در زیر پوست اتفاق میافتد فکر نمیکنید، نمیخواهید مشکل را حل کنید. شما باید عضلات و نحوه کار آنها را برای ساخت رباتهای خوب درک کنید».
دستگاههای Sawicki و Young پوشیدنی هستند و درجات مختلف الکترونیکی و کدگذاری در آنها تعبیه شده است. اگرچه فناوری موجود در آنها متفاوت است، همه آنها یک هدف مشترک دارند، این که حرکت را برای افراد آسانتر کند. در اینجا برخی از پروژههایی که آنها روی آن کار میکنند آورده شده است:
اسکلت بیرونی زانو
Young در حال توسعه یک اسکلت بیرونی کم وزن برای کودکان مبتلا به فلج مغزی است که به آنها کمک میکند تا با شرایطی که به عنوان راه رفتن خمیده شناخته میشود مقابله کنند. این عارضه توسط عضلات و تاندونهای همیشه متشنج ایجاد میشود و اسکلت بیرونی زانو به گونهای طراحی شده است که به عنوان یک مداخله مکانیکی عمل کند و به بازآموزی تاندونها، عضلات و مغز بوسیله بهبود گام برداشتن از نظر بیومکانیکی کمک کند. در حال حاضر گزینههای درمانی شامل فیزیوتراپی و اقدامات جراحی است و امید است که این دستگاه بتواند با کمک به درمانگر در حین فیزیوتراپی، از مداخله جراحی جلوگیری کند. این پروژه توسط مراقبتهای بهداشتی کودکان آتلانتا و کنسرسیوم Atlantic Pediatric Device حمایت میشود.
Young گفت: «نکته خوب در مورد رباتیک کمکی این است که یک درمانگر میتواند از آن برای ایجاد الگوهای آموزشی جدید برای کودکان مبتلا به فلج مغزی استفاده کند تا در نهایت نتایج بالینی طولانی مدت را با استفاده از این دستگاهها بهبود بخشد».
پروتز رباتیک
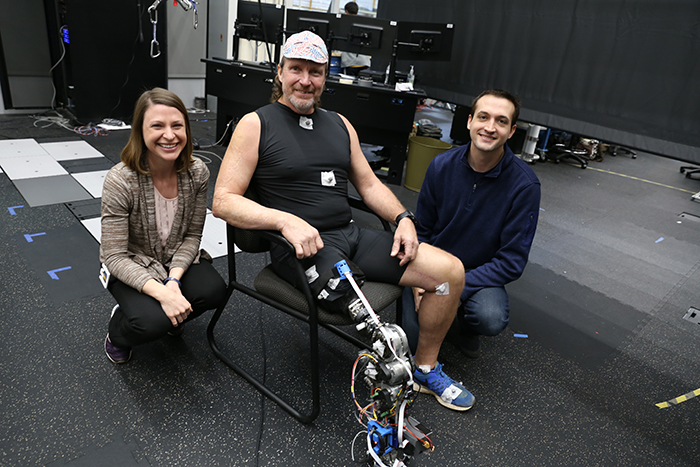
پروتز رباتیک پا یک دستگاه دو مفصلی است که دارای مفاصل زانو و مچ پا است. بیشتر پاهای مصنوعی منفعل هستند و از هیچ نیرویی استفاده نمیکنند و برای انجام یک کار بهینهسازی شدهاند، راه رفتن روی سطوح هم سطح. Young میخواست دستگاهی طراحی کند که بتواند خود را با نیازهای کاربر تطبیق دهد، از پلهها بالا رود، روی رمپ راه رود یا روی زمین صاف حرکت کند.
بخش عمده اینکار درک این مسئله است که چه زمانی فرد میخواهد بین این وظایف مختلف جابجا شود تا بتواند در زمان مناسب، کمکهای مناسب را دریافت کند. هدف این است که برای کاربر، طبیعی و خودکار باشد و در هنگام انتقال نیازی به زدن دکمهها یا سوئیچها نباشد. درواقع هدف توسعه یک سامانه تشخیص قصد است که انواع مختلفی از یادگیری ماشین و روشهای هوش مصنوعی را برای تفسیر اطلاعات حسگرها و پیش بینی آنچه کاربر قصد دارد انجام دهد، به کار میگیرد.
اسکلت بیرونی مستقل مفصل ران
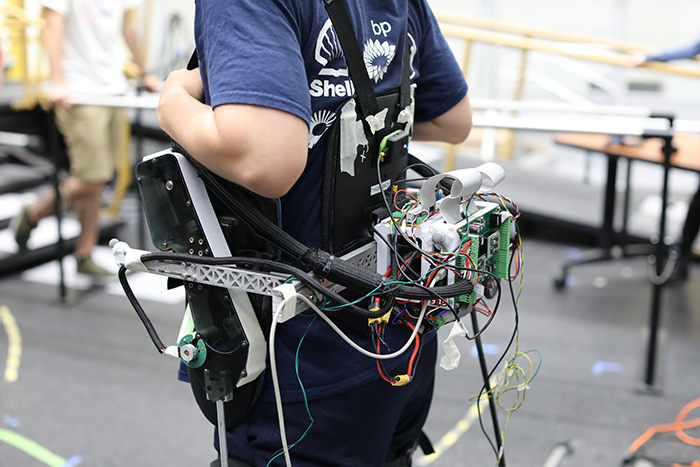
این اسکلت بیرونی مفصل ران در درجه اول برای بیماران سکته مغزی طراحی شده است که قابلیت تحرک خود را از دست دادهاند. اسکلت بیرونی به حرکت فلکشن و اکستنشن مفصل ران کمک میکند. مانند پروتز پا، میزان توان مورد نیاز میتواند بر اساس آنچه کاربر در تلاش است انجام دهد و اینکه آیا میخواهد سریعتر یا کندتر حرکت کند، از پلهها بالا برود یا از سطح شیب دار پایین بیاید، تنظیم شود. این وسیله میتواند برای کمک به کاربران در حرکت راحتتر و مستقل در خانه یا به عنوان یک وسیله درمانی در یک محیط توانبخشی استفاده شود.
Young گفت: «کاربر ممکن است قادر به راه رفتن باشد، اما مانند پیش از آسیب دیدگی خود راه نمیرود. تمرکز ما این است که بفهمیم چگونه رابط کنترلی را بهینه کنیم تا احساس طبیعی داشته باشد. بنابراین بیمار از استفاده از آن لذت میبرد و میتواند با استفاده از این کمک تقویت شده راحتتر حرکت کند».
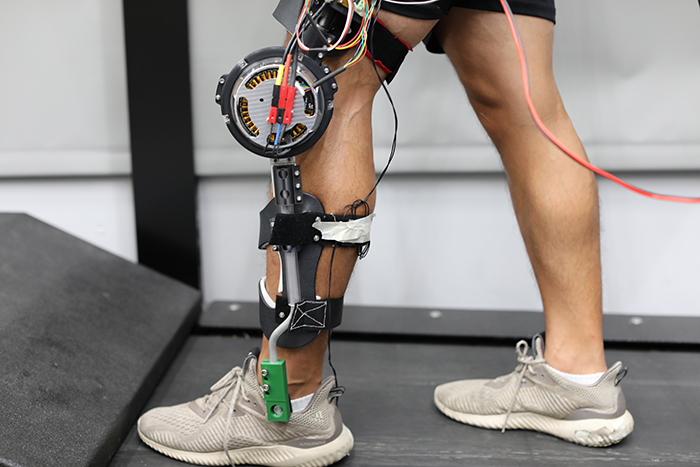
اسکلت بیرونی مچ پا
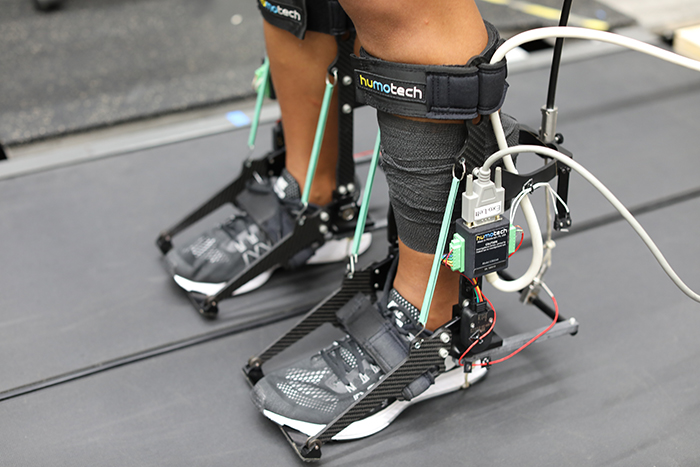
در حالی که سه پروژه نخست بر روی بخشهای نسبتاً کوچکی از جمعیت متمرکز شدهاند، یک اسکلت بیرونی مچ پا برای سالمندان در حال توسعه است.
همانطور که Greg Sawicki آن را توصیف میکند، تاندون آشیل منبع قدرت مچ پا است و با افزایش سن افراد، این فنر توانایی ذخیره و بازگشت انرژی خود را از دست میدهد. این منجر به تلاش و انرژی بیشتری میشود که توسط عضلات برای انجام کاری بکار میرود که زمانی با فنری بودن تاندون انجام میشد. اسکلت بیرونی مچ پای Sawicki از یک سامانه فنری و کلاچ برای بازگرداندن آن جهش و جبران افت عملکرد طبیعی بدن استفاده میکند. این به افرادی که شاید از نیروی کار به بازنشستگی منتقل شدهاند اجازه میدهد سبک زندگی فعال و مستقل خود را حفظ کنند.
تحرک کارآمد و تقویت انسان با رباتهای پوشیدنی
اگرچه هر یک از این پروژهها متفاوت است، اما یک اصل اساسی در پشت هر یک از آنها وجود دارد که بر تحرک کارآمد متمرکز است. بدن انسان یک ماشین فوقالعاده پیچیده است و زمانی که یک قسمت وظیفه خود را به خوبی انجام ندهد سایر قسمتها آن را جبران میکنند که اغلب به ضرر آنها تمام میشود. برای نمونه، آمپوتها اغلب میزان استئوآرتریت و پوکی استخوان بالاتری دارند. همچنین موضوع بهرهوری سوخت وجود دارد. Sawicki بدن را با اتومبیل مقایسه میکند، زمانی که قطعاتی از بین میروند و کارایی خودرو کاهش مییابد و برای طی کردن همان مسافت نیاز به سوخت بیشتری است. زمانی که یک تاندون آشیل خاصت فنری خود را از دست میدهد، ماهیچههای پا در لگن یا زانو باید سختتر کار کنند و انرژی بیشتری مصرف کنند.
Sawicki و Young معتقدند با برداشتن گامهای پیشگیرانه از طریق تقویت انسان با رباتهای پوشیدنی میتوانند مانع کاهش عملکرد قسمتهای مختلف بدن شوند و سالهای فعال و تولیدی جمعیت مسن را افزایش دهند.
بیشتر بخوانیم:
>> نگاهی بر مزایا و معایب اسکلت های بیرونی
>> ایجاد روشی جدید برای بررسی تناسب اسکلت های بیرونی رباتیک با بدن انسان
منبع: me.gatech.edu
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


