آیا اجازه میدهید یک ربات به قلبتان وارد شود؟ در مصاحبه با امیر هوشیار، پژوهشگر موفق ایرانی در دانشگاه کنکوردیا با مجلهی فناوریهای توان افزا و پوشیدنی همراه باشید.
سمت چپ: امیر هوشیار، سمت راست: یک سیم راهنمای قلبی عروقی که ویژگیهای مکانیکی آن در حال آزمایش است.
در حال حاضر جراحان با کمک فناوریهای رباتیکی قادرند فرآیندهای جراحی پیچیده را با ایجاد کمترین بریدگی و جراحت در بدن انجام دهند. چالش اصلی جراحان برای استفاده از رباتها در انجام عمل جراحی نداشتن حس لامسه ضمن انجام عمل است.
امیر هوشیار، یک پژوهشگر در آزمایشگاه Tactile Sensors دانشگاه کنکوردیا که در حال تحصیل در مقطع دکترا در رشتهی مهندسی پزشکی است، این فناوری را توسعه داده است که با تقلید از شرایط عملهای جراحی که با دست انجام میشود، به پزشکان کمک میکند آنچه که ربات ضمن عمل انجام میدهد را احساس کنند.
شما با انجام این پژوهشها به دنبال کسب چه نتیجهای هستید؟
بیماریهای قلبی و عروقی علت اصلی مرگ و میر در جهان است و عملهای جراحی غیرباز که با کمک رباتها انجام میشود، به سرعت در حال رشد و جایگزینی با جراحیهای قلب باز هستند. در طول پنج سال گذشته امکان جراحی با کمک رباتها افقهای جدیدی را برای درمان ایمن و موثر بیماریهای قلبی و عروقی پیش رو نهاده است. تخمینها رشد جهانی امیدوار کنندهای برای استفاده از رباتها در عملهای جراحی قلبی عروقی در دو دههی آینده پیش بینی میکند.
از این فناوری ضمن عملهای جراحی قلبی و عروقی که با کمک رباتها انجام میشوند، استفاده خواهد شد. در این عملهای غیر باز جراحان هیچ درکی از احساس لامسه خود ندارند. بنابراین فناوریهای کمکی مانند سامانهی بازخورد لمسی لازم است تا ادراک لامسهی پزشکان را بازگرداند.
این بازخورد باید بر اساس اندازهگیری برهم کنش بین ربات و بدن بیمار باشد. در پژوهش من این برهم کنش نیروی تماسی بین کاتتر(catheter) و رگهای بیمار است و با استفاده از پردازش تصویر، تجزیه و تحلیل مکانیکی، بازخورد بصری ِ افزوده و بازخورد لمسی برآورد میشود. (کاتتر یک لوله نازک معمولا بلند و قابل انعطاف است که در طیف گستردهای از توابع دانش پزشکی و بهداشت کاربرد دارد. کاتترها میتوانند در بدن بیمار برای یک هدف معین استفاده شوند. با تغییر در مواد و یا تنظیم شکل کاتتر در مرحله تولید، میتوان به کاتتر برای قلب و عروق، ارولوژی، گوارش، سیستم عصبی و برنامههای کاربردی چشمی دست یافت.)
ارتباط تصویر بالا با مطالعات شما چیست؟
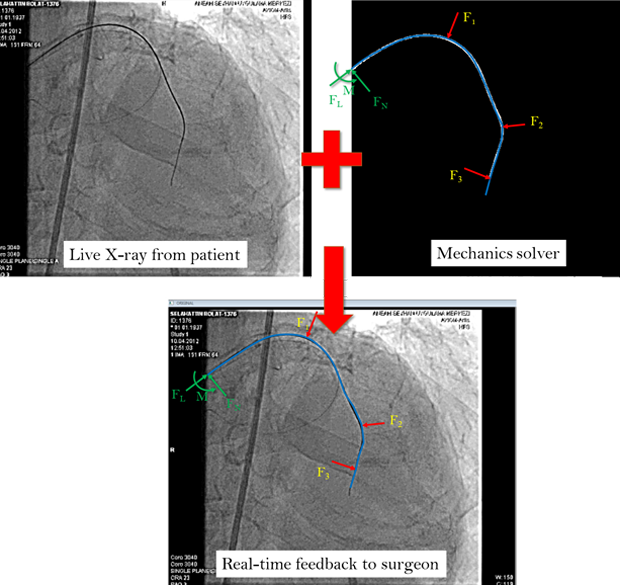
این تصویر سه مرحله را نشان میدهد: پردازش تصویر پزشکی، تجزیه و تحلیل مکانیکی و بازخورد واقعیت افزوده برای یک جراح در طول یک عمل جراحی قلبی عروقی.
شکل کاتتر برای انجام هر تصویربرداری پرتو ایکس از قفسهی سینهی بیمار تعریف و نیروهای خارجی تخمین زده میشوند. سپس نتایج بهدست آمده به تصویر اصلی پرتو ایکس افزوده شده و یک بازخورد بصری و یک بازخورد لمسی برای جراح فراهم آورده میشود. این فرآیند به جراح کمک میکند تا برهمکنش بین بدن و کاتتر را ضمن کنترل رباتیکی متوجه شود.
چالشهای عمده که در این پژوهش با آنها روبهرو هستید چیست؟
کاتترهای قلبی عروقی که در تصاویر پرتو ایکس به صورت خطوط تیره ظاهر میشوند، از لحاظ ساختاری بسیار انعطافپذیرند و رفتار مکانیکی غیرخطی که قابل پیش بینی نیست از خود نشان میدهند. این ویژگی مدلسازی و تجزیه و تحلیل بخشهایی از پژوهش من را مشکل کرده است. افزون بر این، تنوع آناتومی افراد، دسترسی به مخازن تصاویر و دادههای پزشکی، در نظر گرفتن اخلاق پزشکی و محدودیتهای زمانی برای همکاری با کارشناسان پزشکی و جراحان، تعداد دیگری از مشکلات عمدهی پیش رو هستند.
فناوری حاصل از پژوهش شما در چه زمینههایی قابل استفاده است؟
نتایج این پژوهش را میتوان در طراحی و توسعهی وسایل مختلف مورد استفاده در عملهای جراحی غیرباز استفاده کرد. سایر صنایعی که میتوانند از این فناوری بهره ببرند صنعت نفت (برای فناوری حفاری)، صنایع پلیمری (برای شکل دهی) و صنایع الکتریکی (برای استفاده در فرآیند نازک کردن سیمها) هستند.
چه چیزی الهام بخش شما برای انجام این پژوهش بوده است؟
من در نخستین ترم تحصیلیم در کنکوردیا متوجه کمبود این فناوری شدم. یکی از فارغ التحصیلان آزمایشگاه BioRobotics and Tactile Sensors مسئول طراحی و توسعهی نخستین بستر رباتیکی قلبی عروقی تجاری برای یک شرکت آمریکایی بود. بخشی از پژوهش کنونی من بر اساس نیازهای مشخص شده توسط اوست.
هم چنین من در برنامهی CREATE که دربارهی نوآوریهای جراحی است شرکت داشتم. این فرصت امکان حضور من در بیشتر بیمارستانهای بزرگ مونترال از جمله بیمارستان عمومی مونترال و بیمارستان Glen را آسان کرد. افزون بر این آشنایی با نیازهای بالینی و بازخوردهایی که از جراحان و پژوهشگران دانشگاه مک گیل دریافت کردم در شکلدهی پژوهش کنونی من موثر بودهاند.
دانشجویان علاقهمند چگونه میتوانند وارد این زمینهی پژوهشی شوند؟
زمینهی پژوهشی من بسیار کلینیکگرا است و بنابراین داشتن یک درک مهندسی کامل از بدن انسان برای انجام آن الزامی است. پژوهشگران رشتههای مختلف مهندسی میتوانند در بخشهای متنوع این خط پژوهشی وارد شوند. این بخشها عبارتند از پردازش تصویر، کاهش نویز، بیومکانیک بافتهای بدن،کنترل رباتیکی، طراحی سامانههای بازخورد لمسی و بهینه سازی طراحی.
منبع: Concordia


