نمایشگاه آیندهی صنعت و اتوماسیون (صنعت ۴٫۰ – Industry 4.0) توسط Festo در Silicon Valley در اواخر ماه نوامبر گذشته برگزار شد. گذشته از فناوریهای مختلفی که به نمایش گذاشته شد، یک روش کاملا جدید برای دستکاری نیز ارائه شد: Tactile Telerobot یا تله-ربات لمسی. برای دیدن ادامهی این مطلب با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
همکاری چهار شرکت
تله-ربات به کاربران امکان کنترل دقیق حرکت بر روی یک ربات انسان نما را میدهد و این امکان را دارد که نه تنها بتوان تعامل بین انسان و ماشین را دید بلکه احساس نیز کرد. این امر با همکاری چهار شرکت متمایز حاصل شده است:
۱-حسگر BioTac توسط SynTouch – یک غلاف حسگری است که قادر به سنجش میزان احساس لامسه از طریق موقعیت، فشار و سختی مواد است.
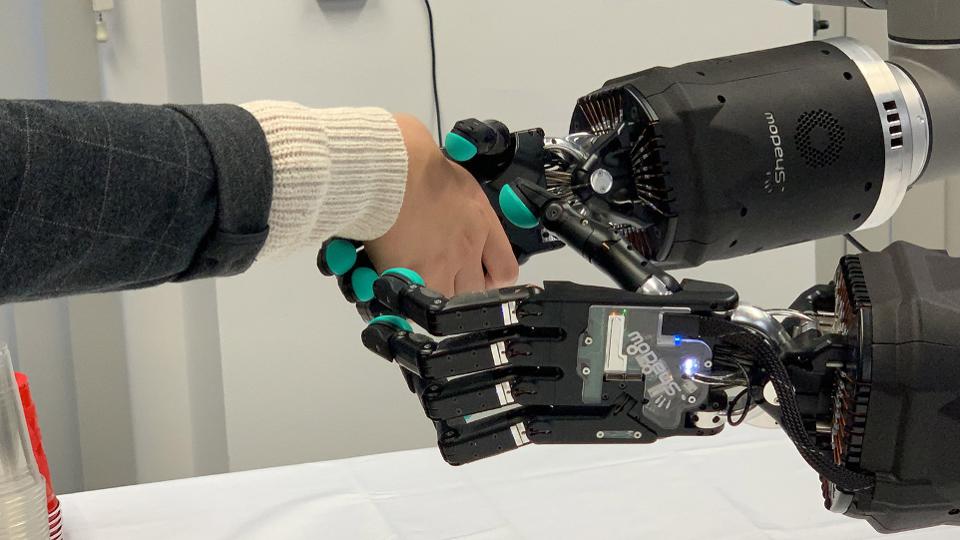
۲-Shadow Dexterous Hand توسط شرکت Shadow Robot – اندامی رباتیک که دست انسان را تقلید میکند.
۳-ربات صنعتی توسط Universal Robots – دست Shadow Dexterous Hand را پشتیبانی کرده و در موقعیت مورد نظر قرار میدهد.
۴-دستکش HaptX – یک دستکش اسکلت بیرونی است که می تواند محل را شناسایی کرده و یک نیروی مقاومتی در برابر هر انگشت از جمله بازخورد نیرو بر روی پوست دست ایجاد کند.
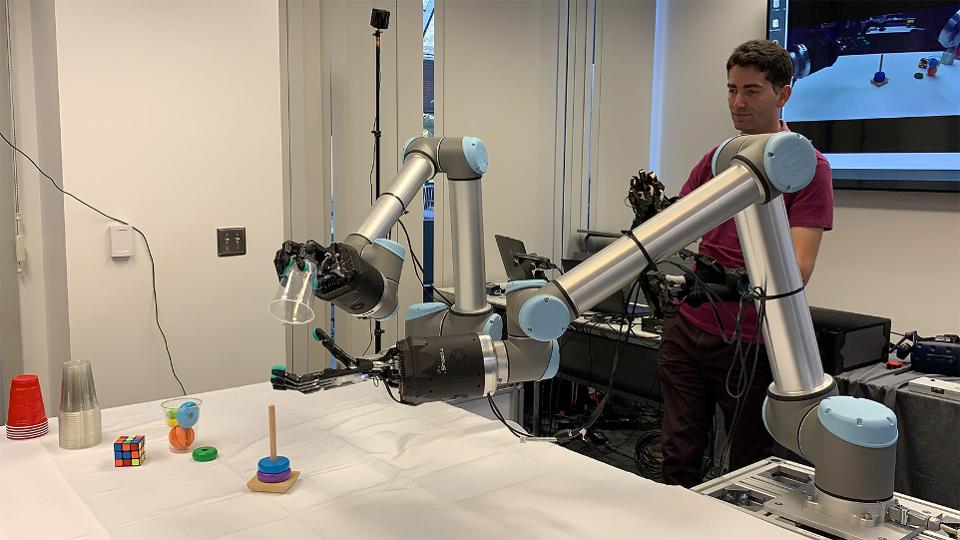
حسگرهای SynTouch به نوک انگشتان Shadow Dexterous Hand متصل شدهاند که به نوبهی خود به دو بازوی رباتیک تهیه شده توسط Universal Robots متصل هستند. دادههای حسی مبنی بر گرفتن یک شی به دستکش HaptX منتقل (نگاشته) میشود که به کاربر پوشنده امکان احساس شیای که در حال دستکاری است را میدهد و اجازه میدهد موقعیت نگهداری خود را تنظیم کند. حسگرهای موجود در دستکش، موقعیت دست ShadowDexterous Hands و بازوی Universal Robot را هدایت میکنند.
امکان برقراری ارتباط بین افراد و محصولات این چهار شرکت مختلف با یکدیگر کار آسانی نیست. نمایش تله-ربات بدون تلاشهای Tangible Research و پشتیبانی All Nippon Airways امکان پذیر نبود. شرکت دوم به دنبال راههای جایگزین برای مسافرت مردم است.
نسخهی نمایشی تله-ربات
تله-ربات یک مشکل واقعی را حل می کند: ما برای هماهنگی دست و چشم خود به احساس لامسهی خود متکی هستیم. نوک انگشتان انسان هرکدام ۳۰۰۰ حسگر فشار دارند. پروفسور Roland S. Johansson در دانشگاه Umeå در سوئد مدت زمان بسیاری را صرف نشان دادن محدودیتهای دستکاری در اشیا بدون ورود حس لامسهی پوست کرده است. حس لامسه برای هدایت حرکتی بصورت موثر، بسیار مهم است. حسگرهای SynTouch که حس لامسه و اسکلت بیرونی را که توسط HaptX دوباره ایجاد میشوند را دیجیتالی میکنند، گامی رو به جلو برای هدایت الکترونیکی از راه دور وسایل رباتیک با دستگیرههای مشابه دست انسان هستند.
دستکش HaptX
دستکشهای HaptX بسیار سبکتر از آنچه که به نظر میآیند هستند. هریک ۴۰۰ گرم (که کمی کمتر از یک پوند است) بدون در نظر گرفتن کابلها. وزن دستکشهای اسکلت بیرونی در طول نسخهی نمایشی قابل توجه نیست، به ویژه اگر کاربر دستان خود را نزدیک بدن خود نگه دارد. دستکش HaptX بر روی یک دستکش نخی نازک پوشیده میشود (برخی معتقدند که دستکش نخی در این حالت یک مادهی داخلی است – یعنی یک محیط جانبی بین کاربر و اسکلت بیرونی). در حالت روشن، دستکش با استفاده از سامانهی بسته شدن BOA، با سازوکاری مشابه با چکمهی اسکی، محکم میشود. برای این آزمون، دستکش HaptX بسیار راحت پوشیده میشود.

دستکش HaptX سه کار را بطور همزمان انجام میدهد. ابتدا موقعیت هر انگشت و دست را کنترل و انتقال میدهد. دوم، میتواند فشار بر انگشتان (بازخورد لمسی) اعمال کند. سرانجام، دارای سازوکار ترمزی است که میتواند بر انگشتان دست کشش اعمال کند تا احساس مقاومت در برابر یک جسم ایجاد کند. اگر منصف باشیم، ردیابیهای حرکتی دیگری هم وجود دارند و دستکشهای بازخورد نیرو نیز در حال توسعه هستند. آنچه که HaptX را خاص میکند این است که می تواند فشار کنترل شدهای را در نقاط مختلف انگشتان و کف دست ایجاد کند.
هر دستکش HaptX دارای حداکثر ۱۳۰ کانال سیلیکونی با فناوری دریچهی متناسبی است که توسط Festo طراحی شده است. این کانالها در حبابهای کوچکی محدود میشوند که از هوا پر میشوند تا گسترش یابند و نیرویی را بر روی پوست اعمال کنند. تحریک با استفاده از یک تراکمساز هوای کوچک و یک کنترلکننده با شیرهای پیزوالکتریک (نوعی ماده که در صورت اعمال میدان الکتریکی دچار تغییر طول میشود) طراحی شده توسط Festo انجام میشود. نکتهی قابل توجه این است که دریچهها فقط باز و بسته نمیشوند بلکه میتوانند میزان هوای موجود در داخلشان را نیز کنترل کنند که به نوبهی خود میزان رشد حبابها را نیز میتوان کنترل کرد. در طول نسخهی نمایشی، این سامانه سطوح متفاوتی از بازخورد نیروی متناسب با قدرت پنجهی Shadow Hand و نیروی درک شده توسط حسگرهای BioTac را ایجاد نمود.
یکی از راههای آزمایش قدرت بازخورد نیروی متناسب، تلاش برای بلند کردن دستهای از لیوانهای پلاستیکی وارونه است. کاربر در واقع میتواند “احساس” کند که چقدر جام را محکم میچسبد و می تواند قدرت گرفتن خود را برای بالا بردن فقط یک، چند یا کل دسته تغییر دهد. این قابلیت با استفاده از هر دو نشانهی دیداری و بازخورد لمسی متناسب توسط دستکش HaptX به دست میآید.
جای تعجب نیست که مرکز تجربی Festo دارای یک دستکش اسکلت بیرونی است. از سال ۲۰۰۶ ، Festo دستگاههای زیست سنجی را با الهام از شکل و عملکرد حیوانات و انسان توسعه داده است. Festo همچنین بین سالهای ۲۰۱۰ تا ۲۰۱۲ روی دستکش اسکلت بیرونی ExoHand کار کرده است.
Rich Walker، مدیر عامل شرکت Shadow Robot گفت: اینکه کل سامانه با هم بخوبی کار میکنند شگفتانگیز است. وی افزود: آنچه ممکن است اکنون تغییر یافته است. تله-ربات نمایانگر ائتلاف منافع هماهنگ با Tangible Research است که با تمرکز بر توسعهی تله-رباتها و همکاری جدی با شرکت Shadow Robot و HaptX برای ساخت این سامانه است. از دیدگاه All Nippon Airways به عنوان حامی مالی، ادغام فناوری حسگر، رباتیک و اسکلت بیرونی فرصتی را برای افراد فراهم میکند تا بدون استفاده از هواپیما “سفر” کنند.
دستکش HaptX افزون بر کمک به کاربران در هدایت دستگاههای رباتیک، ظرفیت واقعی سازی بیشتری را برای فناوری واقعیت مجازی (واقعیت افزوده) دارد. ما میدانیم که دستکاری یک شی را باید چگونه انجام دهیم، اما مغز ما نیز برنامه ریزی شده است تا بفهمد که چگونه دستکاری یک شی را “احساس” کند. اسکلتهای بیرونی بازخورد نیرو میتوانند برای یادگیری واقعیت مجازی یا حتی سرگرمی بسیار مفید باشند.
بیشتر بخوانیم:
» تازه های پوشیدنی: پوشیدنی های پا و دستکش های هوشمند
» کنترل دست به کمک دستکش پوشیدنی دانشگاه شیکاگو
» مروری بر انواع دستکش های هوشمند و توان افزا
منبع: Forbes
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


