Ocado که بزرگترین سوپر مارکت منحصرا اینترنتی جهان است در حال ارزیابی امکان پذیر بودن انتخاب و بسته بندی رباتیکی سفارشها در انبارهای فروش خودکار خود بوده است. این ارزیابی ضمن یک پروژهی SoMa که یکی از چارچوبهای برنامهی Horizon 2020 برای تحقیق و نوآوری است و حامی مالی آن اتحادیهی اروپاست، انجام شده است.
 سوما یک پروژهی تحقیقاتی مشترک بین دانشگاه فنی برلین، دانشگاه دی پیزا، Italiano di Tecnologia، موسسهی علوم و تکنولوژی اتریش، Disney Research Zurich وOcado Technology است.
سوما یک پروژهی تحقیقاتی مشترک بین دانشگاه فنی برلین، دانشگاه دی پیزا، Italiano di Tecnologia، موسسهی علوم و تکنولوژی اتریش، Disney Research Zurich وOcado Technology است.
یکی از چالشهای اصلی به کارگیری فناوریهای رباتیکی گرفتن و بلند کردن اجسام آسیب پذیر و اجسامی که شکلی قابل پیش بینی ندارند بوده است. از جملهی این اجسام میتوان به میوهها و سبزیجات اشاره کرد. این اجسام که اشکال منحصر به فردی دارند باید در شرایطی گرفته و جابه جا شوند که آسیب ندیده وله نشوند. برای جلوگیری از آسیب رسیدن به اجسام حساس این پروژه از یک پنجهی رباتیکی سازگار (یعنی وسایلی که خواص فنری دارند) به همراه یک بازوی رباتیکی صنعتی استفاده کرده است.
یکی دیگر از مشکلاتی که در طراحی یک پنجهی رباتیکی مناسب وجود دارد، متنوع بودن اشکال اجسام هدف است. پنجهی رباتیکی باید به اندازهی کافی تطبیق پذیر باشد تا بتواند گسترهی وسیعی از محصولات را بلند کند. این محصولات شامل محصولات فعلی Ocado هستند که در حدود ۴۸۰۰۰ کالای هایپر مارکت را در برمیگیرد.
سیستم روباتیک RBO softhand
هدف پروژهی سوما طراحی دستهای رباتیکی سازگار برای مدیریت اجسام ظریف بدون داشتن اطلاعات دقیقی در مورد شکل آنها است. به علاوه این بازوهای رباتیکی باید قادر باشند از محدودیتهای محیطی (محدودیتهای فیزیکی که توسط محیط تحمیل میشوند) بهره برداری کند. هدف این پروژه توسعهی یک پنجه رباتیکی همه کاره، قوی و مقرون به صرفه است که قادر باشد اجسام ظریف را به صورت ایمن گرفته و جابه جا کند.
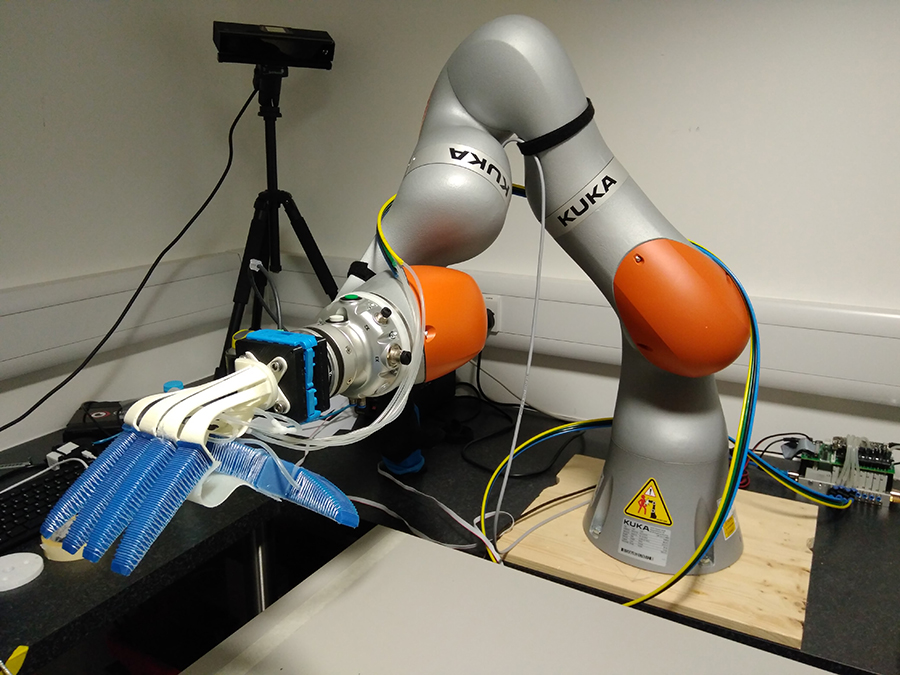
مثالی از یک پنجهی رباتیکی سازگار RBO Hand 2 است که توسط دانشگاه فنی برلین توسعه داده شده است. این پنجه از مواد پلاستیکی انعطاف پذیر که تحت فشار هوا هستند برای برداشتن ایمن و بدون آسیب اجسام استفاده میکند. این وسیله دارای هفت محفظهی هوای جداگانه است و طراحی انسان گونهی آن گسترهی وسیعی از روشهای گرفتن و بلند کردن اجسام را ممکن میسازد.
طراحی سازگار این سامانهی رباتیکی به کار گیری آن را بسیار آسان میکند و تنها با کنترل فشارهوا انگشتان، کف دست، و انگشت شست این پنجه بر اساس شکل هندسی جسم تنظیم میشوند (با استفاده از محاسبات ریخت شناسی).
تلفیق RBO Hand 2 با یک بازوی رباتیکی صنعتی و آزمایش آن برای برداشتن اجسام
تیم رباتیک Ocado برای بررسی کارایی RBO Hand 2 در انجام فعالیتهای Ocado مجموعهای از آزمایشها را طراحی کردند. این گروه این دست رباتیکی نرم را بر روی بازوهای رباتیکی مختلفی از جمله Staubli RX160L و KUKA LBR iiwa14 نصب کردند. نتایج نشان داد که عملکرد هر دو بازو بر اساس استانداردهای لازم است.
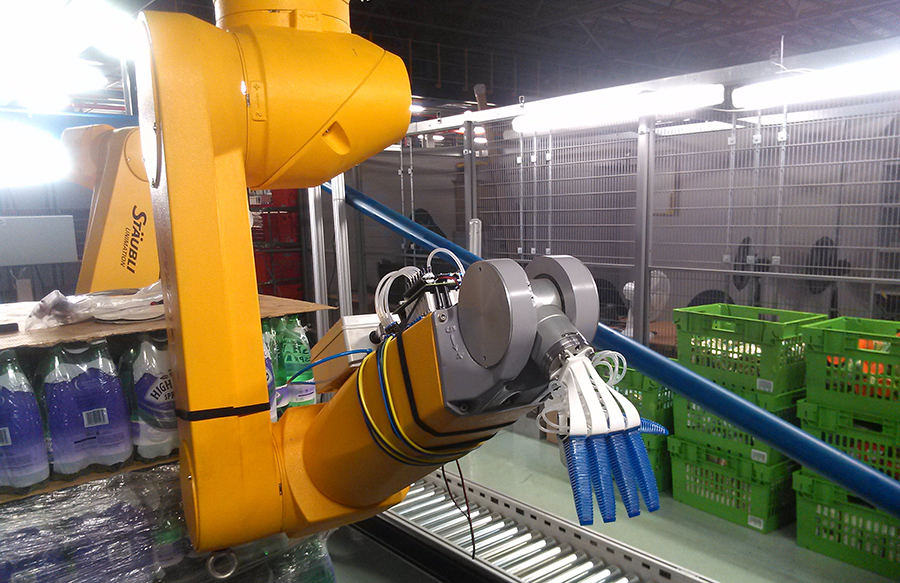 Ocado مجموعهای از آزمایشها برای ارزیابی عملکرد این پنجهی رباتیکی در برداشتن یک سری میوههای مصنوعی که در یک سینی IFCO قرار داده شده بود، طراحی کرد. سینیهای IFCO (که مخفف international fruit container است) ظرفهایی هستند که در سال ۱۹۹۲ در آلمان توسعه یافتند و در ابتدا برای نگه داری میوه و سبزیجات در خرده فروشی مورد استفاده قرار می گرفتند. روشهای اتخاذ شده برای گرفتن موفقیت آمیز اجسام، بر اساس بهره برداری از محدودیتهای فیزیکی مانند دیوارهها و کف سینی بود.
Ocado مجموعهای از آزمایشها برای ارزیابی عملکرد این پنجهی رباتیکی در برداشتن یک سری میوههای مصنوعی که در یک سینی IFCO قرار داده شده بود، طراحی کرد. سینیهای IFCO (که مخفف international fruit container است) ظرفهایی هستند که در سال ۱۹۹۲ در آلمان توسعه یافتند و در ابتدا برای نگه داری میوه و سبزیجات در خرده فروشی مورد استفاده قرار می گرفتند. روشهای اتخاذ شده برای گرفتن موفقیت آمیز اجسام، بر اساس بهره برداری از محدودیتهای فیزیکی مانند دیوارهها و کف سینی بود.
مرحلهی اول آزمایش برداشتن یک جسم از بین یک سری نمونه تنها با استفاده از کف سینی بود. نتایج اولیه نشان داد که این دست قادر است اجسام با شکلهای متنوعی را بلند کند. به علاوه نتایج نشان داد که با به کار گیری موثر محدودیتهای محیطی برای جلوگیری از حرکت جسم، شانس موفقیت برای بلند کردن آن افزایش میابد.
Ocado برنامه دارد تا در ماههای آینده روشهای پیچیدهتر بلند کردن اجسام را با اضافه کردن اجسام بیشتری در IFCO و وارد کردن محدودیتهای محیطی بیشتر آزمایش کند.
پیوندها:
Five applications for craft beer robots
NPR podcasts discuss automation and the future of work
?Automatica’s exhibitors were trumpeting Industry 4.0. Is this the turning point for robotics
Advanced Robotics Manufacturing Institute in planning for USA
منبع: robohub


