هشتمین کنفرانس سالانه انجمن رباتیک پوشیدنی (WearRAcon 2023) در پایان مارس 2023 برگزار شد. برای نخستین بار بود که کنفرانس WearRAcon و کنفرانس ارگونومی کاربردی در یک مکان و بلافاصله پس از یکدیگر برگزار میشدند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

افتتاحیه WearRAcon
با وجود اینکه تعداد غرفهداران کمتری نسبت به سالهای پیش حضور داشتند، WearRAcon همچنان یک رویداد قابل توجه بود. یکی از غرفهداران، ErgoSante، به طور همزمان در حال چاپ سه بعدی و ساخت نخستین اسکلت بیرونی غیرفعال خود در ایالات متحده بود. برای اطلاعات بیشتر در مورد تولید ErgoSante در ایالات متحده، نگاه کنید به: لینک
این کنفرانس به طور رسمی توسط مدیر اجرایی WearRA، دکتر Joseph K. Hitt آغاز شد، که تأکید داشت آینده اسکلتهای بیرونی شغلی مبارزه با خستگی کارگران خواهد بود. دکتر Hitt همچنین نظرات خود را بیان کرد که آینده هرگز روی یک خط مستقیم نخواهد بود و شرکتهای WearRA و رباتیک پوشیدنی باید چابک بمانند و منتظر جهش باشند.
افتتاحیه با دو سخنرانی دنبال شد:
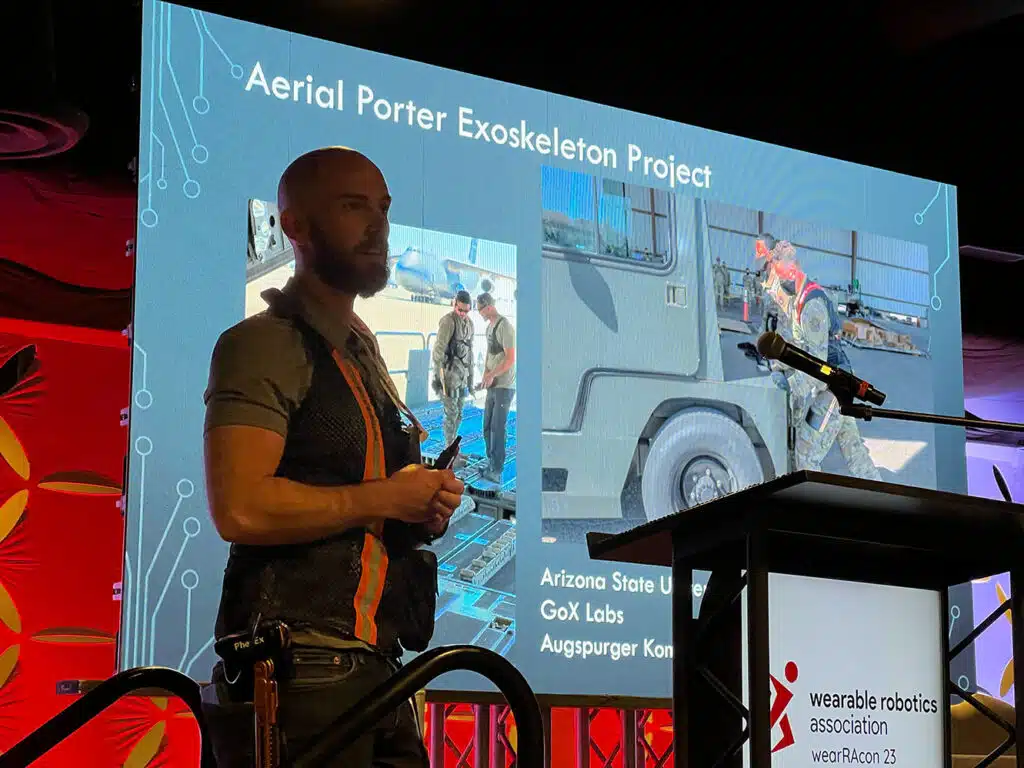
نخست دکتر W. Brandon Martin، نماینده گروه Phoenix Robotics و Augspurger Komm Engineering، که برای نیروی فضایی ایالات متحده مشاوره میدهد، روی صحنه رفت. Martin اسکلت بیرونی شبه منفعل Phoenix را نمایش داد. این فناوری نباید با اسکلت بیرونی پزشکی ساخته شده توسط suitX/Ottobock اشتباه گرفته شود. دیگر خانوادهی برقی این پوشیدنی به تازگی توسط نیروی هوایی ایالات متحده در اکتبر 2022 آزمایش شد. اسکلت بیرونی Phoenix یک نسخه فنری از همان دستگاه است اما دارای یک ماژول کنترل است که میتواند به طور انتخابی عنصر الاستیک را به طور خودکار درگیر یا جدا کند. این امر Phoenix را به طور قابل توجهی مقرون به صرفهتر و در دسترستر از نسخه برقی میکند که پیش از این آزمایش شد.
.

.
Benjamin Shafer و Dean Molinaro از مؤسسه فناوری جورجیا دومین سخنرانی را رهبری کردند. از دیدن این اسکلت بیرونی با این کابلها و سیمها تعجب نکنید. این یک نمایش زنده از یک کنترلر مجهز به هوش مصنوعی بود که میتوانست به طور خودکار میان حالتهای مختلف تغییر کند. اگر تا به حال رقابت اسکلت بیرونی CYBATHLON 2016 یا 2020 را دیده باشید. میدانید چقدر زمان صرف تغییر حالت کنترل صحیح برای ربات پوشیدنی (روی زمین صاف، تغییر سرعت، پلهها، تغییر شیب و غیره) توسط کاربران میشود. آیا داشتن بینش کافی برای اسکلتهای بیرونی برقی برای اینکه بتوانند حالت را به طور مستقل تغییر دهند، فوق العاده نیست!؟
.
.
نکات برجسته
سپس کنفرانس به بخشهای صنعتی و پزشکی تقسیم شد. در مجموع هشت جلسه وجود داشت که بسیاری از آنها چندین ارائه داشتند. پرداختن به همه آنها از حوصله این مقاله خارج است، اما در اینجا برخی از نکات برجسته وجود دارد:
Jason Gillette از دانشگاه ایالتی آیووا و Terry Butler از شرکت مشاوره Lean Steps، به WearRAcon آمدند تا داستان هفت سال آزمایش و ارزیابی اسکلت بیرونی شغلی خود را ادامه دهند. این دو نفر یک وسیله آزمایشی برای ارزیابی قابلیت استفاده از اسکلتهای بیرونی پشتیبان شانه برای دریل کاری در حالت ایستاده یا نشسته و برای جابجایی بارها آورده بودند. سه داوطلب از بین افراد حاضر برای این آزمایش انتخاب شدند. یکی از نوآوریها استفاده از تصویربرداری ویدیویی با محاسبات تولید شده توسط هوش مصنوعی بود؛ برای تعیین اینکه آیا یک کار بالاتر یا پایینتر از آستانه تحمل است. این الگوریتم طی هفت سال پژوهش طراحی شده است. به نظر میرسد این ابزار ارزیابی در حال حاضر توسط Levitate Technologies استفاده میشود، اما ارائه دهندگان تمایل خود را برای رایگان کردن آن در آینده نزدیک نشان دادند.
گروه Automotive Exoskeleton AExG یک انجمن در مورد استفاده از اسکلت بیرونی در تولید برگزار کرد. این انجمن توسط Kaleigh Fleming از Mazda Toyota Manufacturing و Marvyn Rieger از Ottobock Bionic رهبری شد. نکات اولیه این بود که به نظر ارائه دهندگان، پیادهسازی اسکلت بیرونی باید داوطلبانه باشد، با دست کم 3 تا 6 هفته آزمایش اولیه، با منابع اختصاصی در محل و تعهد کتبی از کارکنان علاقهمند به پوشیدن دستگاهها. نکته دیگر این بود که بازرسی و نگهداری دستگاه باید دست کم هر سه ماه یکبار انجام شود. تا از صدمات جدید به دلیل استفاده از اسکلت بیرونی آسیب دیده یا تخریب شده جلوگیری شود.
میزگرد تخصصی

آخرین ارائه در بخش صنعتی، یک میزگرد تخصصی در مورد گذشته و آینده فناوری اسکلت بیرونی بود. این میزگرد توسط Rita Vazquez-Torres، مدیر عامل شرکت New Stone Soup VT LLC رهبری میشد. اعضای میزگرد در مجموع بیش از 70 سال تجربه با اسکلت بیرونی شغلی و نظامی داشتند.
چه چیزی توسط اعضای میزگرد مورد بحث قرار گرفت؟ هیچ کتاب قانونی در مورد پیادهسازی اسکلت بیرونی وجود ندارد. اسکلتهای بیرونی به طور مداوم در حال تکامل هستند. آنها کوچکتر، سبکتر و هوشمندتر میشوند. متأسفانه، اجرا و رهاسازی به عنوان چالشهای اصلی در حال ظهور هستند. برای دسترسی بیشتر کارگران و بهرهمندی از آنها چه میتوان کرد؟ یک نظر تکراری این بود که ما به آموزش بیشتر در مورد خستگی، توصیفات و ویدیوهایی از پوشیدنیهای در حال استفاده نیاز داریم. کارگرانی که انتظار میرود آنها را بپوشند، باید علم پایه را در مورد آنچه که اسکلتهای بیرونی میتوانند و نمیتوانند برایشان انجام دهند، بدانند. متأسفانه، این هنوز یک فناوری پنهان باقی مانده است که تعداد کمی درباره آن میدانند و بسیاری آن را به نفع خود، نادرست توصیف میکنند.
>> WearRAcon 23 را از دست ندهید: نگاهی جامع به رباتیک پوشیدنی و اسکلت بیرونی
منبع: exoskeletonreport.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


