در طول سالها، دانشمندان شیوههای متعدد و گوناگونی را برای تحویل دارو، از قرصهای دو طرفه پیچیده تا نانوذرات حاوی دارو به کار بردهاند. در حال حاضر، پژوهشگران در دانشگاه درکسل فیلادلفیا در حال کار بر روی روشی پیچیدهتر هستند. آنها در حال توسعه رباتهای مهره شکل کوچکی هستند که توسط میدانهای مغناطیسی کنترل می شوند.
این بیشتر شبیه فیلمهای علمی و تخیلی است که رباتهای کوچک در بدن شنا کنند و دارو را در جایی که مورد نیاز است، آزاد سازند. اما این دقیقاً چیزی است که دانشمندان در سراسر جهان برای تحقق بخشیدن به آن تلاش میکنند. ما این مفهوم را در گذشته، در مطالعه مؤسسه ماکس پلانک که روی رباتهای حلزون شکل کار میکردند و یا در دانشگاه کالیفرنیا و پروژه سن دیگو که از میکرو شناگرهای مارپیچ مغناطیسی بهره میبردند، دیدهایم.
پروژه میکرو ربات تحویل دارو در دانشگاه درکسل بر اساس ایدهای مشابه بنا شده که با استفاده از یک میدان مغناطیسی، ربات کوچک را درون سیاهرگ حرکت داده تا شنا کند و دارو را در نقطه مورد نظر تحویل دهد. امروزه، پژوهشگران اعلام کردهاند که گامهای قابل توجهی به سمت ساخت آن در واقعیت برداشتهاند.
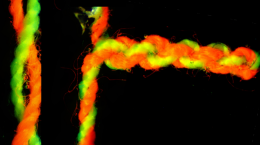
برخلاف دیگر شناگرهای کوچک، میکرو ربات تحویل دارو ی گروه درکسل شبیه مهره است. رباتهای کوچک به صورت مغناطیسی به هم متصل شدهاند و پژوهشگران با استفاده از چرخش میدان مغناطیسی بیرونی باعث چرخش زنجیره ای از آنها شده و از این راه و مشابه پیچاندن، آنها را به جلو هل می دهند. استفاده از میدانهای مغناطیسی برای نیروی محرکه در داخل بدن مناسب است، چون با حرکت در مسیرهای طولانی کمترین تأثیر را بر سلامت بیمار دارند.
گروه سعی کرد از طولهای مختلف برای زنجیره استفاده کند و متوجه شد زنجیرهای از مهرهها که طول بیشتری دارند سریعتر حرکت میکنند. طولانیترین زنجیره مورد مطالعه شامل ۱۳ مهره بود که سرعتی معادل ۱۷٫۸۵ میکرون بر ثانیه داشت.
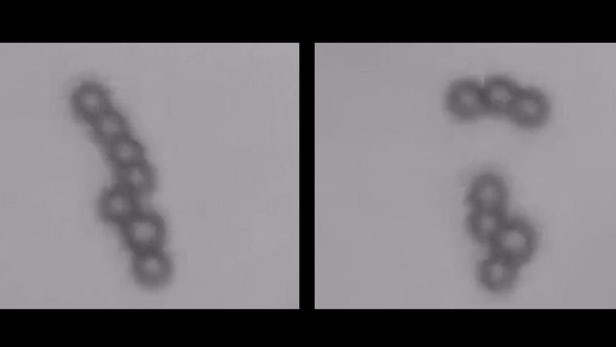
حرکت چرخشی شناگران کلید توانایی آنها برای جدا شدن در زمان مورد نیاز است؛ نرخ خاصی از چرخش باعث جدا شدن آنها میشود و به طور مستقل شروع به حرکت میکنند. همچنین ممکن است با چرخش میدان مغناطیسی مهرهها به هم نزدیک و دوباره به هم متصل شوند.
پژوهش درکسل نشان میدهد که میتوان ار مهارت رباتهای مهره مانند برای رساندن دارو از طریق سیاهرگ ویا باز کردن شریانهای مسدود بهره برد. این بخش مهمی از پازل است، اما هنوز کارهای بسیاری باید انجام شود، دست کم باید نشان داد چنین سامانهای میتواند با تکان دادن، خود را به محل مورد نظر در داخل بدن برساند.
نویسندگان پژوهش میکرو ربات تحویل دارو اظهار داشتند «تنظیمات مختلف سبب ویژگیهای مختلف شناگران میشود؛ همانطور که ما بررسی کردیم سرعت زنجیره وابسته به تعداد مهرههای آن است. برای برنامههای کاربردی تحویل دارو و جراحی با کمترین جراحت، کار آیندهی ما این است که نشان دهیم تنظیمات مختلف گروه مهرهها میتواند سبب جهتیابی از راههای گوناگون در بدن شود و این تنظیمات اعمال شوند تا در طول روش درمان کارهای مختلفی را انجام دهند».
گروه جزئیات کامل پژوهش خود را در مجله گزارشهای علمی منتشر کرده است. برای دیدن رباتهای کوچک میتوانید ویدئوی زیر را بررسی کنید.
منبع: newatlas