با ورود فناوریهای نوین و پیشرفته به دنیای ویلچرهای الکتریکی، امید است آزادی حرکت و استقلال افرادی که از ویلچر استفاده میکنند افزایش یابد. در این مقاله، طبقهبندی ویلچرهای هوشمند (Smart Wheelchair) را معرفی میکنیم. بر ویلچرهای الکتریکی (Power Wheelchair) مروری داریم و فناوری ویلچر هوشمند را بررسی میکنیم. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.

افراد با اختلال حرکتی، حسی و شناختی ناشی از بیماری یا ناتوانی به ویلچرهای الکتریکی نیاز دارند. افزون بر مشکل حرکتی، افرادی که از صندلی چرخدار برای کارهای روزمره استفاده میکنند ممکن است برای خوردن و آشامیدن و گرفتن وسایل و ارتباط با دیگران به فرد دیگری نیاز داشته و به تنهایی توانایی انجام برخی کارها را نداشته باشند. در این راستا، فناوریهای جدیدی برای ویلچرهای الکتریکی معرفی شدهاند که انجام کارهای روزمره را برای کاربران آسانتر میکند و استقلال بیشتری به آنها میدهد.
تعریف ویلچر هوشمند
ویلچرها را میتوان به ویلچر دستی، ویلچر الکتریکی، ویلچر هوشمند دستهبندی کرد. ویلچر دستی توسط نیروی دست کاربر یا افراد همراه هدایت میشود. در ویلچر الکتریکی بر خلاف ویلچر دستی، از یک موتور برای به حرکت در آوردن ویلچر استفاده میشود. به طور کلی میتوان گفت ویلچر هوشمند، “یک ویلچر الکتریکی است که به سامانههای رایانهای، مجموعهای از حسگرهای مختلف و فناوریهای کمکی مجهز شده است“. به بیان دیگر، ویلچر هوشمند را میتوان یک ربات متحرک همراه با صندلی چرخدار در نظر گرفت.
نخستین ویلچر الکتریکی توسط جورج کلین (George Klein) برای افرادی که در جنگ جهانی دوم دچار فلج کامل شده بودند ساخته شد. در سال ۱۹۵۶، یک شرکت آمریکایی، تولید انبوه ویلچر برقی را آغاز کرد. اگرچه هدف اصلی طراحی ویلچرها افراد با ناتوانی حرکتی هستند که نمیتوانند از ویلچرهای دستی استفاده کنند ولی حتی افرادی که ضعف عضلانی دارند از این نوع ویلچرها استفاده میکنند.
یک ویلچر برقی بسته به سامانهی هدایت به کار رفته، دارای توانایی عبور از پله، قرار گرفتن در حالت ایستاده، ویلچرهای چهار چرخ و ویلچرهای تسمهای هستند. در ویلچرهای تسمهای به جای چرخ مانند ساختار تانک از تسمه استفاده شده است.
در ویلچرهای الکتریکی در ابتدا از باتریهای سلول مرطوب استفاده میشد. پس از آن باتریهای سلول خشک جایگزین این نوع باتریها شد. از محدودیتهای باتریهای مرطوب میتوان عدم اجازه ورود به هواپیما را برشمرد. این باتریها را در هنگام سوار شدن به هواپیما باید از ویلچر خارج و به صورت جداگانه به مقصد ارسال کرد.
برای برخی از افرادی که نمیتوانند از جوی استیکهای دستی مرسوم در راستای هدایت صندلی چرخدار خود استفاده کنند، سامانههای کنترلی جایگزینی مانند جوی استیکهای سر و سامانهی کنترلی چانه طراحی شده است. حتی بعضی از ویلچرها با سامانهی کنترلی دم و بازدم هدایت میشوند. در جدیدترین طراحیها، کنترل با ذهن نیز برای حرکت ویلچر به کار برده شده است. مجموعه حسگرهای جلوگیری از برخورد با مانع در صنعت خودروهای خودران پیشرفت بسیاری داشتهاند. این حسگرها برای ویلچرهای هوشمند به کار برده میشوند.
محل نشستن ویلچر بسته به جنس آن در ویلچرها متفاوت است. برای جلوگیری از مشکل زخم بستر، از صندلیهای با جنس فوم، ژلهای و هوا استفاده میشود. بالشتی که در پشت صندلی در قسمت کمر قرار میگیرد به طور معمول از جنس فوم است. برخی از آنها از طریق سامانه کنترلی، قابل تنظیم هستند و محل قرارگیری آن میتواند خم شود یا به صورت خوابیده در آید. پشتیبانیهای جانبی نیز از متمایل شدن بدن کاربر جلوگیری میکنند. محل قرارگیری پاها در برخی موارد قابل جدا شدن هستند یا حتی از طریق سامانهی کنترلی به حالت مطلوب تنظیم میشوند. افراد فلج کامل افزون بر امکانات مرسوم ویلچرهای الکتریکی، نیاز به قابلیتهای بیشتری از جمله ملاحظات امنیتی، چراغها و بازتابندههای نور، دوربینهای عقب و سامانههای جدید هدایت ویلچر دارند.
افزودن بازوهای نگهدارنده برای کاربردهای متفاوت از نخستین تلاشها برای بهبود ویلچرهای الکتریکی بود. بازوهای نگهدارنده میز، رایانه، گوشی موبایل حتی دوربینهای عکاسی که به افراد روی ویلچر اجازه میدهد کارهای روزمره و حرفهای خود را به راحتی انجام دهند.
تلاش برای تبدیل ویلچر الکتریکی به ویلچر هوشمند امروزی
در این بخش با دستاوردهای جدیدی آشنا میشویم که ویلچرهای الکتریکی را به ویلچرهای هوشمند تبدیل کرده است. بسیاری از ویلچرهای هوشمند، ویلچرهای الکتریکی هستند که فناوریهای جدیدی مانند رایانه و حسگر روی آنها جاسازی میشود. در حالت ایدهآل، سامانهی هوشمند ویلچر باید به راحتی از ویلچر الکتریکی جدا شود و بتوان آن را روی دیگر ویلچرها سوار کرد. این خصوصیت برای کودکانی که از صندلی چرخدار استفاده میکنند ضروری است چرا که همزمان با رشد، مجبور هستند ویلچر خود را تغییر دهند. ویژگی ایدهآل دیگر که در طراحی سامانهی هوشمند ویلچر درنظر گرفته میشود این است که برای هر سطح ناتوانی حرکتی و حسی قابل استفاده باشد.
ویلچرهای هوشمند را بسته به روش تعامل کاربر (Input Method)، روشهای مسیریابی هوشمند (Operating Mode) و عوامل انسانی (Human Factor) میتوان طبقهبندی کرد.
طبقهبندی ویلچر هوشمند بر اساس روشهای تعامل کاربر
روشهای تعامل کاربر میتواند به صورت شتابسنج (Accelerometer) و سیگنال EEG و دیگر روشهای بیان شده در زیر باشد:
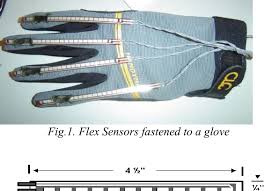
تعامل از طریق انگشتان دست
۱) روش بیومتریک
۲)رابط مغز-رایانه
۳)شبکه ابری
۴)بینایی ماشین (Computer Vision)
۵)کنترلر بازی
۶)بازخورد حسی
۷)لمسی (Touch)
۸)گفتار و فرمان صوتی

تعامل از طریق شتاب سنج
با توجه به خصوصیتهای کاربر و محدودیتهایی او نوع روش تعاملی انتخاب میشود. برخی از ویلچرها از ترکیب چند روش تعاملی استفاده میکنند. در پژوهشی تلاش شده است با تعریف پروفایل برای کاربر، محدودیت و توانایی حرکتی او مشخص شود و با توجه به آن، نوع روش تعاملی از میان چند روش انتخاب شود.
یکی از راههای جلوگیری از برخورد با مانع به کارگیری دوربینهای کم هزینه به همراه نرمافزارهای پیچیده بینایی ماشین است. همچنین با کمک اطلاعات مکانی و GPS، هدایت و مسیریابی ویلچر بهبود مییابد. گوشیهای هوشمند امروزی اگر با حسگرهای جاسازی شده بر ویلچر سازگار شوند، میتوانند اطلاعات ویلچر را دریافت کنند. با استفاده از تصویربرداریهای سهبعدی، اسکنرهای سهبعدی و دوربینها و مسافتیابهای لیزری میتوان مانعهای موجود در محیط ویلچر را شناسایی کرد. هرچند هنوز بسیاری از این حسگرها دارای قیمت بالا و توان مصرفی زیاد و وزن زیاد هستند.
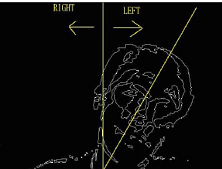
تعامل از طریق ردیابی حرکت سر کاربر
در حالت ایدهآل در روش تعاملی کاربر هرچه تعداد دستورات از سوی کاربر کمتر باشد، روش تعاملی بهتری میان کاربر و ویلچر هوشمند ایجاد خواهد شد. در طراحی ویلچرهای هوشمند تمایل به روشهای تعاملی است که کمترین نیاز به دستورهای کاربر باشد و ویلچر هوشمند با اطلاعات دریافتی از فعالیتهای روزمره کاربر، به صورت خودکار عمل کند و به ویژگی هوشمند بودن نزدیک شود. در بخشهای بعدی مقاله به طبقهبندی ویلچرهای هوشمند با توجه به روشهای مسیریابی و عوامل انسانی خواهیم پرداخت.
بیشتر بخوانیم:
>>برترین صندلی چرخدار در بالا رفتن از پلهها
>>یک لندروور در میان ویلچرها: Ripchair، صندلی چرخدار برای حرکت در مسیرهای ناهموار
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


