گروهی از پژوهشگران دانشگاه بیهانگ چین و دانشگاه آلبورگ دانمارک یک پای رباتیک پوشیدنی که در واقع نوعی زانوی مصنوعی رباتیک است طراحی کردهاند و ادعا میکنند که یکی از نخستین دستگاهها در نوع خود و دارای ویژگیهای حرکت طبیعی زانو است.
دستگاه زانوی مصنوعی رباتیک برای کمک به قربانیان سکته مغزی و بیماران معلول طراحی شده است تا عضلات آنها را تقویت کند و این بیماران بتوانند به طور بالقوه توانایی راه رفتن را مجدداً بدست آورند.
این دستگاه پوشیدنی یکی از نخستین دستگاههایی است که روی جزئیات مفصل زانو متمرکز شده است. زانو یکی از پیچیدهترین سامانههای مکانیکی درون بدن انسان و یک عضو حیاتی در طول راه رفتن است.
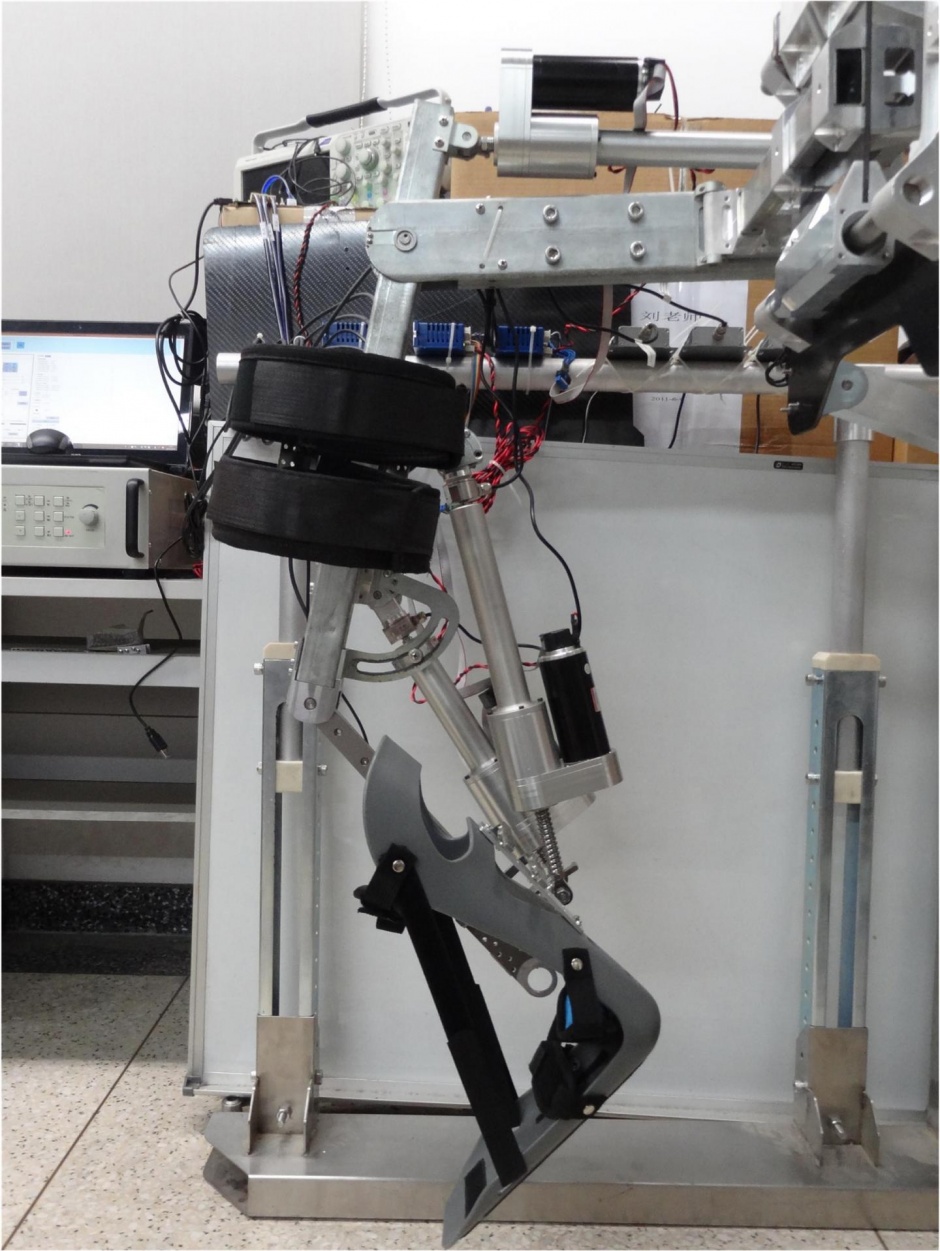
در این زانوی مصنوعی رباتیک حرکت مفصل زانو توسط چند ماهیچه اسکلتی در امتداد سطوح مفصلی فعال میشود. برای اینکه اطمینان حاصل شود این دستگاه نیز همچون زانوی طبیعی انسان شبیهسازی شده دارای یک مکانیسم موازی مانند ماهیچههای اسکلتی است.
ویهای چن، استاد دانشگاه بیهانگ در زمینه علم اتوماسیون و مهندسی برق در پکن چین توضیح میدهد: «طراحی جدید ما دارای ویژگی مفصل موازی زانو است تا بیشتر شبیه زانوی طبیعی باشد و سازگاری اسکلت بیرونی را بهبود ببخشد».
نتیجه این طراحی دستگاهی است که به عنوان نخستین دستگاهی شناخته میشود که از یک مکانیسم موازی در مفصل زانو به تقلید از عضلات اسکلتی استفاده کرده است. چن افزود: «طراحی ما فراتر از حل مشکل شفافیت (حالت زجاجی) در مفصل زانو است. همچنین این طراحی دارای ساختار سادهای است. بر خلاف بسیاری از اسکلتهای بیرونی قبلی که مفصل زانو به سادگی با یک مفصل پینی جایگزین میشد، ما دو درجه آزادی برای حرکت اسکلت بیرونی مطابق با حرکت طبیعی بیماران فراهم کردهایم».
این گروه در حال بررسی تعدادی گزینه برای کنترل اسکلت بیرونی است. از جمله استفاده از سیگنالهای الکتریکی عضله (الکترومیوگرافی – EMG) و پالسهای الکتریکی مغز (الکتروانسفالوگرام – EEG).
گام بعدی، آزمایشهای بالینی این سامانه و همکاری با بیمارستانها است. چن میگوید: «ما همچنین قصد داریم در آیندهای نزدیک این وسیله را تجاری کنیم و با ایجاد رباتهایی رابط کاربری را بهبود ببخشیم تا کار برای کاربر جذابتر باشد».
در زمینه زانوی مصنوعی رباتیک بیشتر بخوانید
>>اسکلت بیرونی برقی مفصل ران-زانوی LEGO
>>اسکلت بیرونی VariLeg با تغییر امپدانس از زانوی انسان تقلید میکند
منبع: the engineer


