استفاده از رباتیک در علم توانبخشی پس از گسترش آن و با تلاش برای تطبیق دستگاههای حاضر با نیازهای مختلف آغاز شد. پس از آن ادغام حسگرها، استفاده از بازوهای رباتیک روی ویلچرها و ساخت دستگاههای ویژه کودکان این علم را به پیش برد. در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به مرور دستگاها و تاریخهای مهم رباتیک توانبخشی از زبان Roboticbiz میپردازیم.

برای آشنایی با تاریخچه رباتهای توانبخشی باید به ابتدای دهه ۱۹۵۰ بازگردیم، زمانیکه علم رباتیک ماهیت خود را کشف میکرد. در ابتدا علم رباتیک به ساخت رباتهای بزرگ و سنگین برای جایگزین کردن نیروی کار در مشاغل خطرناک، ناامن و کثیف اختصاص داشت. همزمان علم رباتیک توانبخشی نیز باز ساخت ارتزهای رباتیک کمکم راه خود در توانبخشی را باز میکرد.
یک مثال مهم بازوی دانشگاه Case Western در دهه ۱۹۶۰ و Rancho Los Amigos Golden Arm در ابتدای دهه هفتاد قرن بیستم بود. این ابزارها نمونه رباتیک از یک ارتز مکانیکی بودند. به عنوان مثال Golden Arm با یکسری کلید میتوانست تک تک مفاصل دست را کنترل کند. این کلیدها توسط زبان فعال میشد. هر چند این روش موثر بود، اما برای کاربر سنگین و طاقتفرسا بود.
در اواسط قرن بیستم بخش بازنشستگان وزارت دفاع از یک سری آزمایشگاه علوم تجربی پشتیبانی کرد که توسط Seamone و Schmiesster اداره میشد. هدف این آزمایشگاهها ساخت ارتزهای رایانهای خاصی بود که قادر به انجام فعالیتهای روزانه مانند غذا خوردن و ورق زدن کاغذ باشد. این طرح را باید نخستین تلاش برای ساخت یک بستر کنترل کننده برای رباتهای توانبخشی دانست. پژوهشگران این آزمایشگاهها نگاهی فراتر از یک بستر کنترل کننده مفاصل به صورت مجزا داشتند. آنان به یک بستر تطبیق پذیر و با بصیرت چشم داشتند.
تطبیق ربات های صنعتی برای توانبخشی
در دهه هفتاد پیشرفت سامانه French Spartacus نیز به پیشرفتهای در زمینه ارتزها و پروتزهای رباتیک افزوده شد. French Spartacus به کاربران دارای آسیب نخاعی و کودکان مبتلا به فلج مغزی کمک میکرد. سامانه French Spartacus، برخلاف سایر سامانههای زمان خود، از دل کمیسیون انرژی هستهای در فرانسه سر برآورده بود. در ابتدا Spartacus به کاربران خود کمک میکرد لولههای سوخت هستهای را با یک دستگاه کنترل از راه دور جابهجا کنند.
سامانه Spartacus یک دستگاه کنترل مانند کنترل بازی داشت که کاربران دارای ناتوانی جسمی با آن اشیا را جابهجا میکردند. این سامانه از دل یک آزمایشگاه رباتیک زاده نشد، بلکه براساس یک سامانه موجود در آن زمان توسعه یافت. Jean Vertut نام فردی است که در ساخت این وسیله توانبخشی نقش موثری داشت.
در حدود یک دهه بعد،Hik Kwee یکی از پژوهشگران سامانه Spartacusبود که طرحی به نام MANUS را کلید زد. طرح MANUS تلاشی برای ایجاد گیره سوار شده روی ویلچر بود که به طور خاص در حوزه توانبخشی فعالیت میکرد. این وسیله نخستین وسیله در نوع خود بود که از تطبیق سامانهای دیگر با بخش توانبخشی ساخته نشده بود. ساخت MANUS را باید گامی مهم در پیشبرد علم رباتیک توانبخشی دانست. چراکه این دستگاه رباتی تخصصی در علم رباتیک محسوب میشد.

آغاز فعالیت Stanford در عرصه رباتیک توانبخشی با VAR
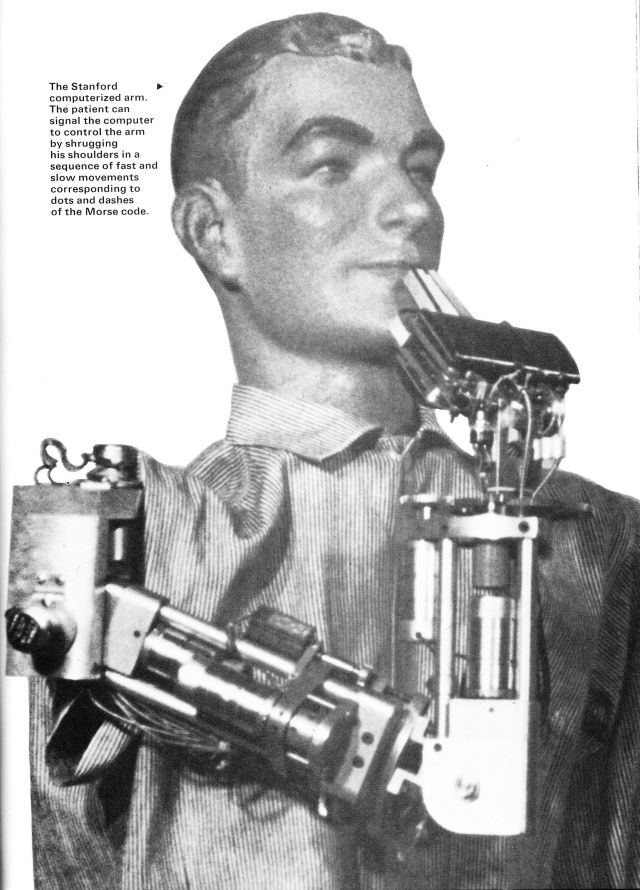
در میان هیاهوی علم رباتیک و ساخت نخستین طرحهای بزرگ توانبخشی رباتیک، دانشگاه Stanford با رهبری Larry Leifer طرحی مهم را آغاز کرد. Stanford رباتی را ساخت که برای توانبخشی بازنشستگان ارتش و زیر نظر بخش بازنشستگان فعالیت داشت. هدف Stanford ساخت رباتی برای کاردرمانی بود.

با گذشت بیش از چندین دهه از ساخت این ربات کاردرمانگر، نسخههای مختلف آن به عنوان ربات رومیزی کمکی در کاردرمانی( desktop vocational assistant robot یا DeV AR)، نسخه قابل حمل این ربات( mobile vocational assistant robor یا MoVAR) و در نهایت ربات کمکی کاردرمانی تخصصی ( professional vocational assistant robotیا ProVAR) نیز به بازنشستگان در کاردرمانی کمک میکرد. ProVAR به طور خاص ویژگی پیشرفتهای داشت که به کاربر اجازه میداد در محیطی کاربردوست مانند یک مرورگر توانبخشی را تجربه کند.
نسخه ابتدایی یا DeVAR در سال ۱۹۹۰ وارد بازار شد. اما آزمایش آن توسط کاربران نشان داد که هزینه نسبت به کارایی زیادی داشت. بنابراین پیشرفت آن به سمت ProVAR تمایل پیدا کرد. در این زمان Machiel Van der Loos سرپرست این طرح بود. تمام نسخههای این ربات کاردرمانگر براساس دستگاه واکنشگر Puma-260 یا (Programmable Universal Machine) ساخته شده بود. به این شکل سازندگان از عملکرد ایمن این دستگاه اطمینان مییافتند.
ترکیب حسگرها با ربات ها
در سال ۲۰۰۶ تمرکز دانشمندان علوم رباتیک به ساخت و ترکیب دستگاههای حسگر در رباتها معطوف شد. همزمان آنان به دنبال گزینههای کم هزینهتر نیز بودند. این گذار مهم در نهایت به بهبود قابلیتهای رباتهای توانبخشی و برهمکنش آن با محیط انجامید.
در میانه دهه هشتاد از قرن بیستم میلادی دانشمندان Universal Machine Intelligence( که بعدها با عنوان Oxford Intelligent Machines یا OxIM شناخته شدند) با تشخیص درست محدودیت دستگاههای صنعتی، آموزشی و دستگاههای کمکی موجود در بازار، تلاش خود را به ساخت سامانههایی معطول کردند که به طور خاص برای انجام امور توانبخشی طراحی میشد.
در طی ده سال آنان طیفی از دستگاههایی را ساختند که نسخه ابتدایی آن RTX نام داشت. دانشمندان OxIM این دستگاهها را به لینیکهای توانبخشی سرتاسر دنیا ارائه دادند. کشور فرانسه بخصوص از این رباتها استفاده میکرد. فرانسه و اتحادیه اروپایی پژوهش از این طرحها پشتیبانی میکردند. بنابراین OxIM قادر به انجام انواع آزمایشهای بالینی برای سامانههای توان افزای خود بود. از جمله طرحهای این دوره میتوان به Robot for Assisting the Integration of the Disabled (RAID) و سپس سامانه MASTER اشاره کرد.
پس از انتهای فعالیت OxIM شرکت فرانسوی Afma Robotics کار تجاری سازی سامانه MASTER را به عهده گرفت. آنان در سال ۲۰۰۷ این سامانه را وارد بازار کردند.
نخستین رباتی که غذا را به دهان کاربر خود غذا میگذاشت ربات Handy-I نام داشت که در بریتانیا توسط Mike Topping طراحی شد. Rehabilitation Robotics, Ltd این ربات را در دهه ۹۰ تجاری سازی کرده بود. Handy-I باید به کاربران مبتلا به فلج مغزی در غذا خوردن کمک میکرد. از این دستگاه با توجه به هزینه آن استقبال خوبی به عمل آمد. با گذر زمان و توجه کاربران به سایر نیازهای دستگاه، این دستگاه قابلیت شستن صورت و اعمال مواد آرایشی را نیز پیدا کرد.
ربات های قابل حمل توانبخشی
تاریخچه رباتهای قابل حمل توانبخشی به دهه هشتاد بازمیگردد. زمانیکه رباتهای صنعتی برای اهداف توانبخشی بهینه میشد. با توجه به کمک مالی National Institute on Disability and Rehabilitation Research یا NIDRR به عنوان یک مرکز پژوهش مهندسی روی رباتهای توانبخشی در بیمارستان Delaware چندین طرح به صورت همزمان در زمینه توانبخشی پیش میرفت. این کمک هزینه مالی از سال ۱۹۹۳ تا ۱۹۹۷ اهدا میشد.
در این زمان همراهی دو شرکت RERC و Applied Resources, Corp به ساخت و تجاری سازی چندین محصول انجامید. در این زمان باید به یکی از پژوهشگران موثر این دو شرکت با نام Rick Mahoney اشاره کرد که در ساخت یک بازوی سوار شونده روی ویلچر با نام RAPTOR نقش مهمی داشت. بازوی RAPTOR حوزه توانبخشی رباتیک را گامی به جلو برد.

در اروپا یکی از طرحها مهم در زمینه دستگاههای متحرک را باید MANUS دانست. این طرح توسط Hok Kwee در مرکز تحقیق و توسعه توانبخشی ( Rehabilitation Research and Development Center یا iRV) در هلند اداره میشد. طرح مذکور به طور تخصصی روی دستگاههایی کار میکرد که روی ویلچر سوار میشدند. این دستگاهها با یک دسته هدایت میشد و بازخوردی نیز از طریق یک صفحه نمایش روی بازو برای کاربر نشان میداد.
این طرح الهام بخش تعداد زیادی پژوهش در همین زمینه بود. در نهایت این سامانه توسط Exact Dynamics BV در هلند تجاری سازی شد. اینک در هلند این دستگاه برای کاربران واجد شرایط دارای فلج مغزی و تتراپلژی ناشی از آسیب نخاعی رایگان است.
ادغام فناوری های ردیابی در ویلچرها
در دهه هشتاد ساخت ویلچرهای مسیریاب کمکم گسترش مییافت. در این زمان استفاده از فناوری مافوق صوت برای سنجش فاصله متداول می شد. این حسگرهای مافوق صوت ارزان و کوچک با قطر ۳ سانتی متر پیرامون ویلچر قرار میگرفت و برای مکانیابی تا فاصلههای ۱۰ تا ۵۰۰ سانتیمتر به کار میرفت. حسگر فوق توسط شرکت Polaroid Corporation تجاری سازی شد.
تا سال ۲۰۰۰ فناوریهای سنجش فاصله با لیزر و الگوریتمهای سریعتر و هوشمندتر مکانیابی با دقت بالا و خاطی کمتر برای مکان یابی ویلچرها ابداع شد. به طور مثال در اواخر دهه نود قرن بیستم در کره جنوبی و در مرکز Human Walfare Robotics یک سامانه ردیابی ویلچر برای بهبود تواناییهای ویلچرها ساخته شد. موسسه KAIST این سامانه را KAIST Rahabilitation Engineering System مینامید. همزمان سامانه NavCahir نیز در دانشگاه Michigan ساخته میشد. این سامانه پایه و اساس Hephaestus در دانشگاه پیتسبورگ بود که به کاربر اجازه میداد تا حدی به صورت مستقل در محیطهای مختلف با ویلچر حرکت کند.

ربات های توانبخشی
ربات های توانبخشی نسبت به رباتهای کمکی با تاخیر شروع به رشد کردند. در میانه دهه هشتاد نخستین نمونه از رباتهای تمرین دهنده مانند BioDex ساخته شد. این دستگاه نخستین دستگاه کنترل کننده نیرو بود که قابل برنامه ریزی بود. البته حرکات آن تنها به یک محور محدود میشد. نخستین مفهوم چند محوری توسط Khalili و Zomlefer منتشر شد. در همین زمان Robert Erlandsonو گروهش در Wayne State University نیز نخستین سامانه از این نوع را ساختند و آزمایش کردند.
استفاده از حسگرها در ربات های توانبخشی
Robert Erlandson در میانه دهه هشتاد دستگاه RTX را به عنوان یک وسیله حساس به لمس معرفی کرد. این وسیله به بیماران مبتلا به ناتوانی بالاتنه کمک میکرد پس از سکته تمرینات کاردرمانی انجام دهند. بیماران باید پس از دریافت یک سیگنال بصری روی یک صفحه یک کلید را فشار میدادند. زمان عکسالعمل بیمار در هرجلسه ثبت و با جلسه قبل مقایسه میشد.
پس از این رباتهای توانبخشی نوعی دستگاه کنترل کننده با نیرو داشتند. این نوع حسگرها نیازمند یک پردازنده قویتر نسبت به دستگاههای پیشین بود. در ابتدای دهه نود طرح MIT-MANUS و پس از آن طرح MIME و مشتقات آن از این نوع حسگرها استفاده میکردند. طرح نخست توسط Neville Hoganو Igo Krebs و طرح دوم توسط Simulation Environmet for Arm Therapy یا SEAT و با همکاری Charles Burgar، Machiel Van der Loos و Peter Lum کلید خورد. از طرحهای مشابه میتوان به AMR از موسسه توانبخشی شیکاگو به سرپرستی Zev Rymer و David Reinkersmeyer اشاره کرد. این طرح با رویکردی نو به توانبخشی بالاتنه میپرداخت. در توانبخشی با ARM از چندین روش برای ارائه نتایج استفاده میشد.
ربات های توانبخشی کودکان
در اوایل دهه هشتاد بود که رباتها کمکی برای کودکان با مشکلات ارتباطی و فیزیکی ساخته شد. این رباتها به کودکان کمک میکرد در برهمکنش با محیط پیرامون خود تا حدی کنترل را بدست گیرند. در این زمان بود که رباتهایی برای آموزش نیز ساخته شد. در اوایل قرن ۲۱ شرکت Anthrotoronix و در واقع فردی به نام Corinna Latham یک سامانه رباتیک کوچک را تجاری سازی کرد که به کودکان دارای ناتوانی فیزیکی اجازه میداد توسط یک بستر ساده در بازیهای مختلف شرکت کنند.
گروه Kerstin Fautenhan با استفاده از یک ربات متحرک کوچک در کلینیکها به کودکان مبتلا به اتیسم کمک میکردند. بستر ساده این رباتها ارتباط با آنان را ساده میکرد و در نتیجه برقراری ارتباط با سایرین برای این کودکان چالش کمتری داشت.
حیوانات رباتیک به عنوان هم کلان و همره
همزمان با این پیشرفتها در ابتدای قرن بیست و یکم حیوانات خانگی رباتیک مانند Parlo ظهور کردند. Parlo یک همراه برای کودکان و سالمندانی بود که در محیط کلینیک محصور شده بودند. این ربات با برقراری ارتباطاتی که بیمار از آن محروم شده بود به آنان کمک میکرد تجربیات خود را از دنیای بیرون بیشتر کنند. حیوانات رباتیک در واقع برای شبیه سازی برهمکنشهای اجتماعی و ارائه نوعی پیشتیبانی احساسی ساخته شده بودند.
پیشرفت در مواد، نرم افزار، بهبود کیفیت و کاهش حجم حسگرها و عملگرهای همگی به گسترش کاربردهای رباتها در همه ابعاد کمک کرده است. این پیشرفتها به طراحان اجازه داده است که راههای متفاوتی برای بهره بردن از فناوری مکاترونیک و بهبود کیفیت زندگی را تجربه کنند.
نقش ربات ها در عملیات امداد و نجات
اسکلت بیرونی موجب تسکین جراحان و محافظت از بیماران در اتاق عمل
منبع:roboticbiz
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


