استفاده از چاپ سه بعدی برای ساختن اندامهای مصنوعی و سایر ابزارهای درمانی سفارشی، بدون تردید یکی از بهترین نمونههای کاربرد فناوری برای حل مشکلات دنیای واقعی است.
با وجود پیشرفتهای زیادی که در زمینۀ ساختن بازوهای مصنوعی صورت گرفته است، همچنان دردهای مزمن زیادی بیماران گوناگون را با مشکلات گوناگونی به ویژه در ناحیۀ دست و انگشتها آزاد میدهد. بسیاری از حادثه دیدگان قادر به استفادۀ مؤثر از انگشتهای خود نیستند و برای بازگرداندن توانایی حرکتی دستهای خود نیازمند درمانهای توانبخشی هستند.
به تازگی یک مهندس طراح به نام Daniel Levy، یک وسیلۀ اسکلت بیرونی قابل چاپ با فناوری چاپ سه بعدی و متن باز ساخته است که به گونهای طراحی شده که بتواند به بیماران دارای ضعف در حرکت انگشتان در بازتوانی حرکتی دستانشان کمک کند.
وی میگوید:
«من عضو یک گروه پژوهشی هستم که در قالب طرح mountaintop در دانشگاه Lehigh تشکیل شده است. در این طرح به ما موقعیت و فضای کار بر روی یک پروژۀ دلخواه به مدت ده هفته و کمک مالی ۱۵۰۰ دلار برای هر نفر و بدون نظارت و قوانین دست و پا گیر داده شد.»
Levy به همراه چهارتن دیگر اعضای گروهش در این مدت وسیلهای را طراحی کرده و ساختهاند که به کمک حرکتهای مچ دست میتواند انگشتان را باز و بسته کند.
Levy می گوید: «من این پروژه را انجام دادم زیرا همیشه عاشق چاپ سه بعدی، نمونه سازی و طراحی بودهام.»
انگیزۀ طراحی یک اسکلت خارجی زمانی در وی پدید آمد که دید برادر یکی از دوستانش به خاطر آسیب دیدگی ستون فقرات قادر به استفاده از دست خود نیست.
وی میگوید:
«یکی از تلخ ترین و پررنگترین خاطراتم که انگیزۀ اصلی برای آغاز این پروژه بود آن بود که زمانی که میخواستم با او دست بدهم و سلام کنم، تنها کاری که توانست انجام دهد بلند کردن دستش بود. در آن لحظه بود که فهمیدم زندگی برای او چقدر متفاوت است و انجام دادن کارهای ساده چقدر برایش دشوار است.
از یک سال پیش طراحی این وسیله بر مبنای استفاده از حرکت تاندونهای دست و به کار بردن حرکت مچ برای حرکت دادن و خم کردن انگشتان بود. من میخواستم از این ایده برای طراحی وسیلهای استفاده کنم که بیمار با آن بتواند وسایلی را که در حالت عادی توانایی برداشتن آنها را ندارد در دست گرفته و بلند کند.»
Levy گامهای نخستین طراحی مفهومی را با بررسی عملکرد مچ دست خود و تکان دادن آن به سمت بالا و پایین و دیدن اثر آن بر روی تاندونهای انگشتان برداشت و یک نمونۀ اولیه در نرمافزار Solid Works طراحی کرد. او با چاپ نمونه و بازطراحی چندین بارۀ مدل خود تلاش کرد تا نظریههای مکانیکی خود را بیازماید. هنگامی که وی راه درست طراحی را یاد گرفت، طراحی خود را بر روی سه عامل مهم که باعث میشوند وسیلۀ ساخته شده بیشترین کارایی را برای بیشترین طیف کاربران داشته باشد متمرکز نمود. این سه عامل عبارتند بودند از: سفارشی سازی، راحتی و آسان بودن بکارگیری آن.

Levy میگوید:
«کسانی که دچار آسیب دیدگی یا مشکلات ستون فقرات میشوند معمولاً روند بازتوانی حرکتیشان از بالا به پایین است. یعنی نخست شانهها، سپس آرنجها، سپس مچها و در پایان انگشتان توانایی حرکتی خود را باز مییابند. بسیاری از بیماران هیچ گاه توانایی حرکت انگشتان خود را به طور کامل باز نمییابند اما میتوانند خیلی راحت مچهای خود را حرکت دهند. در طراحی این وسیله دو کاربرد در نظر گرفته شده است. نخست کاربرد کمک حرکتی آن است. دستگاه میتواند به بیمار برای برداشتن و در دست گرفتن اجسام کمک کند و نیروی مورد نیاز انگشتان را تأمین نماید. کاربرد دوم این وسیله، توانبخشی انگشتان در منزل است. بیمار با پوشیدن این وسیله و تکرار حرکت مچ دست این کار را انجام میدهد. توانبخشی بر پایۀ تکرار، بر مبنای نظریۀ انعطاف پذیری عصبی است. بر این اساس گفته میشود که انجام حرکتهای کمکی به تعداد زیاد و مداوم، رشتههای ارتباطی تازهای را در مغز پدید میآورد و در نتیجه بیمار به تدریج میتواند اندامهای خود را بدون کمک خارجی تکان دهد.»
Levy در طی فرایند طراحی به برادر دوستش سر میزد تا بتواند بازخورد دقیقی از طراحی داشته باشد و آن را تصحیح کند.
با توجه به صحبتهای Levy متوجه شدیم که مسئولان طرح Mountaintop دو چاپگر سه بعدی Makerbot Replicator و Ultimaker 2 را برای چاپ قطعههای مورد نیاز در اختیار وی قرار دادند. برای افزایش استحکام، قطعات تا حد امکان توپر ساخته شدند و بیشینه زمان چاپ هر قطعه حدود ۱۸ تا ۲۰ ساعت بود.
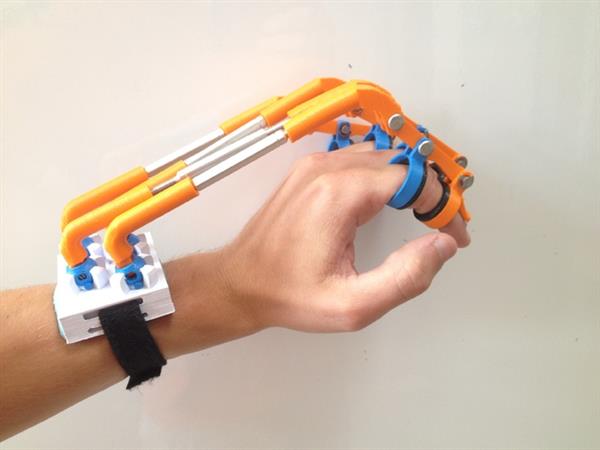
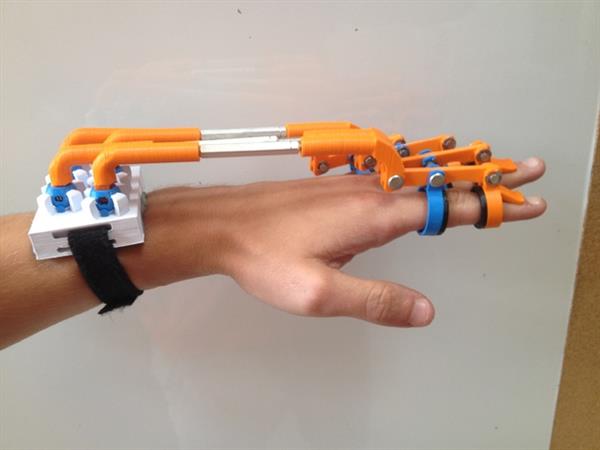
طراحی نهایی دست عنکبوتی Levy همانند نمونههای پیشین آن بر مبنای حرکت مچ دست برای باز و بسته کردن انگشتان است. از آنجا که هیچ دو کاربری ویژگیهای دقیقاً یکسانی ندارند، این دست به گونهای طراحی شده که بتوان از دو راه آن را برای هر کاربر تنظیم کرد. نخست قابلیت تغییر طول میلههای فلزی برای تنظیم فاصله میان ساعد و انگشتان است که تا حدود ۲ اینچ قابلیت جابجایی دارد و برای هر اندازه دستی مناسب است. ضمن آنکه وضعیت هر انگشت را میتوان جداگانه تنظیم کرد. دوم آنکه جایگاههای قرار گرفتن انگشتان را میتوان به طور جداگانه و بدون نیاز به تعویض کل دستگاه تعویض کرد.
Levy میافزاید:
«من هماکنون در حال کار بر روی نمونههایی با اندازه های دیگر هستم تا بتوانم اسناد آنها را نیز بر روی وبگاه Thingverse قرار دهم. بخش انگشت شست را نیز یکی از همگروهیهایم به نام Elena Ramirez طراحی کرده است. وظیفۀ این بخش، محکم نگه داشتن شست است تا بتواند فشار ناشی از سایر انگشتان یا اجسام را تحمل کند. همچنین در این وسیله امکان تنظیم کردن میزان باز و بسته شدن انگشتان با توجه به اندازۀ دست بیمار و جسمی که در دست میگیرد وجود دارد.»

«برای نشان دادن کارایی این وسیله میتوانید ببینید که من با خم کردن مچ دستم به سمت عقب میتوانم انگشتانم را ببندم و حتی با آنکه تلاش میکنم انگشتانم را صاف کنم، باز هم میتوانم اجسام را در این وضعیت بردارم.
البته دستان من سالم هستند و تنها نسخهای اولیه از این وسیله را فقط بر روی دستان یکی از دوستانم امتحان کردهام. پیشنمونهای که ساخته بودیم مناسب دستان او نبود و فقط شامل انگشت اشاره بود. اما با این حال او میتوانست با این وسیله انگشت خود را باز کند و اجسام بزرگی را بردارد. من امیدوارم بتوانم نسخۀ تازه را تا دو هفتۀ آینده بر روی او امتحان کنم.»
هدف کنونی Levy رسندن این وسیله به دست تعداد بیشتری از افراد است تا بتواند بازخوردهای بیشتری از آنان بگیرد و طراحیهای خود را برای فراهم شدن امکان استفادۀ گسترۀ بیشتری از کاربران بهبود دهد.
«هدف من این است که این وسیلهها را به صورت متن باز در اختیار همه قرار دهم و در کنار آن یک وبگاه / پست الکترونیک نیز برای تماس مردم با خودم داشته باشم تا اگر عدهای نیاز به طرحهای سفارشی داشتند بتوانم محصولهای سفارشی به آنها بفروشم.»
اگر مایلید یک دست اسکلت خارجی بسازید میتوانید از فایلهای STL او که در وبگاه Thingverse قرار دارد استفاده کنید. او همچنین در فکر ضبط یک ویدئوی آموزشی برای سرهم بندی اجزا و شیوۀ کار با آن در آیندۀ نزدیک است.
منبع: ۳ders.org


