پژوهشگران دانشگاه ملی سئول یک دستکش رباتیک توانافزا ساختند که از یک حسگر الکترومیوگرافی (EMG) نزدیک مچ دست برای مدلسازی دقیق اهداف کاربر استفاده میکند. آنها کشف کردند که اتصال یک حسگر EMG در نزدیکی مچ برای درک نیت کاربر نسبت به روش معمول، اتصال پنج حسگر به پنج عضله دست، پایدارتر و دقیقتر است. با این کشف استفاده عملی از رباتهای پوشیدنی شتاب گرفته است و راه را برای تولید انبوه این نوع فناوریها هموار میکند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

موانع تولید انبوه رباتهای پوشیدنی
رباتهای پوشیدنی، مانند دستکشهای اسکلت بیرونی، میتوانند به کاربرانی که از نظر تحرک یا قدرت محدود هستند برای برداشتن یا در دست نگه داشتن اشیاء کمک کند. اگرچه تجهیزات بسیاری برای کمک به حرکت افراد دارای اختلال در حال تولید است، اما همه نمونههای اولیه برای کمک به زندگی واقعی تولید نشدهاند و به تولید انبوه نمیرسند. هزینههای تولید بسیار بالا است و تعداد مصرف کنندگانی که توانایی پرداخت این هزینهها را دارند به شدت کاهش مییابد.
رباتهای پوشیدنی هوشمند به تجهیزاتی برای درک اهداف کاربر و کمک به آنها در لحظات حساس نیاز دارد. حسگرهای بسیاری برای تعیین قصد کاربر لازم است. حسگرها برای هر شخص متفاوت است. به دلیل اندازهها و اشکال مختلف بدن، نمی توان حسگرها را به یک شکل ساخت. به همین دلیل، استفاده از یک ربات پوشیدنی که برای طیف وسیعی از افراد کار کند، به هیچ وجه کار سادهای نیست. و تولید انبوه این فناوری را دشوار میکند.
عضله انسان درست پیش از ایجاد نیرو، سیگنال الکتریکی به نام EMG تولید میکند. فناوری درک قصد حرکتی کاربر با استفاده از این سیگنال پیش از این در تولید پروتزها و سایر دستگاهها استفاده شده است. گاهی چندین عضله برای یک حرکت و بعضی اوقات یک عضله برای چندین حرکت استفاده میشود. بنابراین برای تعیین قصد کاربر به چندین حسگر نیاز است.
در طراحی دستکش جدید از یک حسگر EMG برای درک اهداف کاربر و کمک به آنها در برداشتن یک شیء استفاده شده است. گرچه این فناوری جدید نیست، اما به طور معمول از حسگرهای بسیاری برای تعیین اهداف فرد استفاده میشد.
پتانسیل تولید انبوه اسکلت بیرونی
دستکش جدید رباتیک تعداد حسگرهای مورد نیاز برای تشخیص اهداف کاربر را بشدت کاهش میدهد و امکان تولید انبوه فناوریهای مختلف را فراهم میکند.
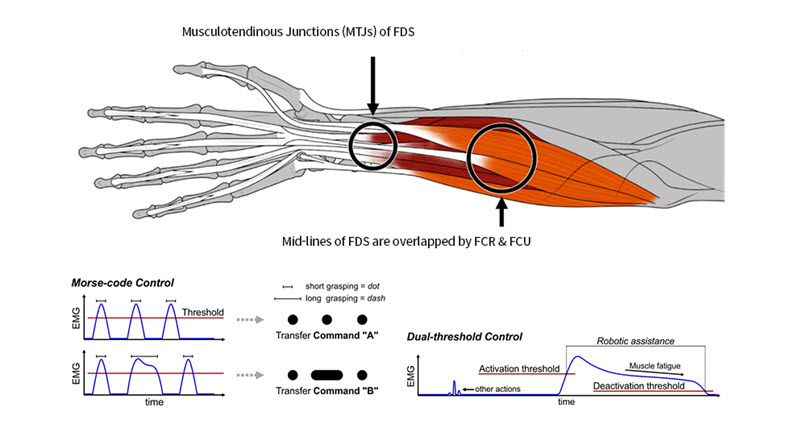
این دستکش از کشفیات اخیر مربوط به قدرت سیگنالهای EMG در محل اتصال تاندون-عضله واقع در داخل مچ دست بهره میبرد. پژوهشگران دریافتهاند که سیگنال حاصل از این مفصل یک شاخص قابل اعتماد برای چندین حرکت است.
با آزمایشهای مختلف، پژوهشگران نشان دادند که دستکش تک حسگری دقت بیشتری نسبت به روش معمول اتصال پنج حسگر به پنج عضله جداگانه دست دارد.
همچنین این گروه یک روش کنترلی برای انتقال سیگنال EMG گرفته شده از داخل مچ دست به ربات با استفاده از کد مورس ابداع کردند.
پژوهشهای بیشتری لازم است. این تیم اظهار داشت که مشکل فناوری نیست، بلکه نبود علم و دانش در مورد حرکت انسان است که مانع تولید انبوه این فناوری میشود. این گروه پژوهشی از دانشگاه ملی سئول یک گام دیگر به تهیه دستکش اسکلت بیرونی نزدیک شد که میتواند زندگی افراد مبتلا به اختلالات عضلانی را به طور گسترده تغییر دهد.
بیشتر بخوانیم:
>>کنترل دست به کمک دستکش پوشیدنی دانشگاه شیکاگو
>> مروری بر انواع دستکش های هوشمند و توان افزا
منبع: en.snu.ac.kr
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


