همه ما گهگاه تعادلمان را از دست میدهیم، لیز میخوریم و سقوط میکنیم. اما برای برخی صرفاً راه رفتن خطرات بسیاری را به دنبال دارد چون تعادلشان از بین میرود و سقوط میکنند. این افراد به دلیل آسیب، بیماری یا کهولت سن قادر به حفظ تعادل خود نیستند. دکتر Pilwon Hur، استادیار گروه مهندسی مکانیک در دانشگاه تگزاس A & M در حال تلاش برای کمک به افرادی با مسائل مربوط به حفظ تعادل است. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

Hur و گروهش در بخش توانبخشی انسانی در تگزاس A & M با استفاده از بیومکانیک و نورومکانیک در حال توسعه ابزارهای پروتز رباتیک هستند تا به کسانی که بموجب آسیب، بیماری یا کهولت سن قادر به حفظ تعادل خود نیستند کمک کند.
پژوهشهای پیشین Hur به دو پرسش پاسخ داد: «آیا میتوانیم سقوط را پیش بینی کنیم؟ آیا میتوانیم تعداد سقوط را کاهش دهیم؟» اطلاعاتی که او از افراد تحت آزمایش جمعآوری و به مدل ریاضی خود وارد کرد، موجب شد وی به این نتیجه دست یابد که خطر سقوط افراد را میتوان پیش بینی کرد. پژوهش Hur بر جنبههای بیومکانیک و نورومکانیک راه رفتن و حفظ تعادل انسان با رباتیک متمرکز است. وی در حال حاضر دانش خود را در یک مرکز توانبخشی و با استفاده از دادههای متفاوت اعمال میکند.
Hur میگوید: «راه رفتن انسان و حفظ تعادل با توجه به تأخیر عصبی قابل توجه و زمان پردازش اطلاعات بسیار قوی و مطلوب است. بینشهای فراوانی وجود دارد که ما میتوانیم از رفتارهای انسانی و کنترلهای حرکتی یاد بگیریم. پر کردن شکاف بین بیو/ نورومکانیک و رباتیک یکی از حیاتیترین گامهای پژوهش من است که برای دستیابی به بهترین نتایج توانبخشی رباتیک، روی آن تمرکز کردهام».
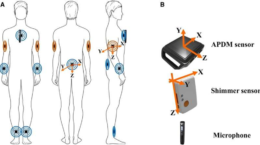
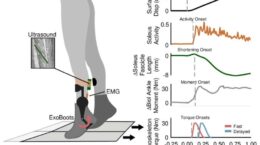
Hur و گروهش با افرادی با توانایی راه رفتن و حفظ تعادل طبیعی کار میکنند. این افراد در محیطی قرار میگیرند که در آن یک سقوط کنترل شده و راه رفتن روی یک سطح چرب که موجب لغزش و سقوط آنها میشود را تجربه میکنند. حسگرهای متصل به هر عضله با اندازه گیری فعالیت ماهیچهای اطلاعات مربوط به سقوط و حفظ تعادل را جمع آوری میکنند.
از آنجا که پژوهشگران معتقدند این فرمان عصبی است که تعادل را تنظیم میکند، با استفاده از این دادهها حفظ تعادل را به چندین زیر مجموعه تقسیم میکنند. این کار به گروه Hur کمک میکند تا برنامههای کمک کننده را متناسب با عادات راه رفتن هر فرد برنامهریزی کنند.
Hur یکی از پژوهشگرانی است که روی امکان ایجاد این ابزارهای رباتیک کار میکند. ابزارهای رباتیکی که نه تنها میتواند شبیه یک انسان راه برود بلکه در صورت لغزش غیرمنتظره یا سکندری خوردن، بر اساس الگوریتمهای سفارشی میتواند کمک کننده باشند. این الگوریتمها از رفتار انسان یاد میگیرد و از این طریق آموزش میبیند. اسکلتهای بیرونی رباتیک بسیاری توسعه یافته است که به بیماران کمک میکند به طور معمولی راه بروند. اما آنها بسیار بزرگ هستند و قادر به کمک به فردی با عدم تعادل غیر منتظره نیستند. به این معنی که آنها متناسب با نیازهای منحصر به فرد بیمار نیستند. تحولات Hur هر دوی این مسائل را تصحیح خواهد کرد.
Hur گفت: «من خودم را تنها به توانبخشی محدود نمیکنم زیرا بخشهای دیگر بسیاری وجود دارد که میتوانم دانش خود را به آن اعمال کنم. در حال حاضر، قصد دارم روی توانبخشی تمرکز کنم تا بتوانیم پروتزهای رباتیک و اسکلتهای بیرونی بهتر، انسان دوستانهتر، سبکتر و قدرتمندتری داشته باشیم».
این پروژه AMPRO نامیده میشود. همچنین گروه پژوهشی Hur توسعه یک پروتز جدید را انجام داده است که از نظر بیومکانیک کارآمدتر و سبکتر است. گروه افزون بر این پروژه، بر روی یک دستگاه تعادلی کار میکند. این دستگاه با استفاده از درک روش بیومکانیک و نورومکانیک، حفظ تعادل را به بیمارانی که مستعد سقوط هستند، دوباره آموزش میدهد. این دستگاه از یک کنترل دستی استفاده میکند که موجب تحریک پوست در هنگام ایجاد اختلال در بدن میشود و مغز را برای تشخیص عدم تعادل و اصلاح آن تمرین میدهد.
بیشتر بخوانید:
>>نگاهی دقیقتر به ربات HERMES: حفظ تعادل ربات به کمک مغز انسان!
منبع: phys.org
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»